您当前的位置:首页>论文资料>基于双目视觉的无人机姿态测量
内容简介
 应用研究
应用研究基于双目视觉的无人机姿态测量
黄少强刘中华汤晚霞钟艳王飞
(上海电机学院电子信息学院上海200240)
与在用
摘要无人机的姿态参数是飞行日标状态的重要参数。日前对无人机的姿毒测量方法大致可分为两大类,即途测法和外测法。追测法即在无人机上装置各类传感器(如GPS、陀螺仪、高速摄像仅等)进行参数测量,此方法还存在很大缺点川,加当飞行目标高造飞行时,传感器会产生较大的数据误差甚至无法侦擦到无人机的信息,导致测量失败。在外测法中,对于中运距高的姿态测量,国内外大量使用的是基于广义点反馈选代的影像匹配法,此方法具有较高的精确度,但由于测量前要先建立数据序,国而适用性较低。针对以上的缺点,本文采用了基于双日视竞的无人机姿态测量方法,采用全站仅和图像采集装置构建系统,利用全站仪数据递行三维标定,图像采集装置对无人机进行三维重建,利用双目直线原理重构机身、机具的空间直线向量,利用BP神经网络算法行数据的机器学习。该系统具有简易、精度高、设计简单等特点,被广泛应用于军事、其用系统中,其有很强的实用价值,
关键词无人机双日视觉机器学寸姿态识别
中图分类号:TP391.41
文献标识码:A
无人机的姿态测量方法可分两大类:一是在无人机上装载传感器如陷螺仪、GPS等,把相关的数据传回地面处理,即所谓的遥测法,它的优点是可以不受空间的限制,但精准度会大大降低,本文采用基于双目视觉党的无人机资态测量方法,采用全站仪和图像采集装置构建系统利用全站仪数据进行三维标定,像采集装置对无人机进行三维重建利用双目直线原理重构机身、机需的空间直线向量再根据直线向量算
出姿态参数,该方法具有精度高,适用范围高等特点, 1系统设计概述
本设计利用四台全高清的摄像头、全站仪,时间同步器及PC终端组成。系统由四台摄像头分别处于边长为5米的矩形场地的(我给你新加的文字)四个角中,用以(我给你新加的文字)采集视频数据,再由全站仪提供的相关角度失量参数,通过计算得出系统所需要测量的资态参数:偏航角、筛仰角及翻滚角。最后把这此参数存储到数据库中,并进行BP神经网络算法机器学习,让该系统具有(新加)能够二次识别飞行目标参数的能力。该系统能广泛应用于无人机的主动测量领域,即不需要在无人机上安装传感器,也能够准确识别无人机
的态参数,应用方便、快捷。 2姿态参数计算分析
步骤一:利用双目视觉原理,对飞行物体进行三维资态恢复,步骤二:分离目标和背录,对飞行物体进行数字信息提取。统计
每顿图像像素分布直方图,设此时像素分布直方图的灰度分布为 g及g,在g及g中选择较合适的灰度值g作为分割的阅值,
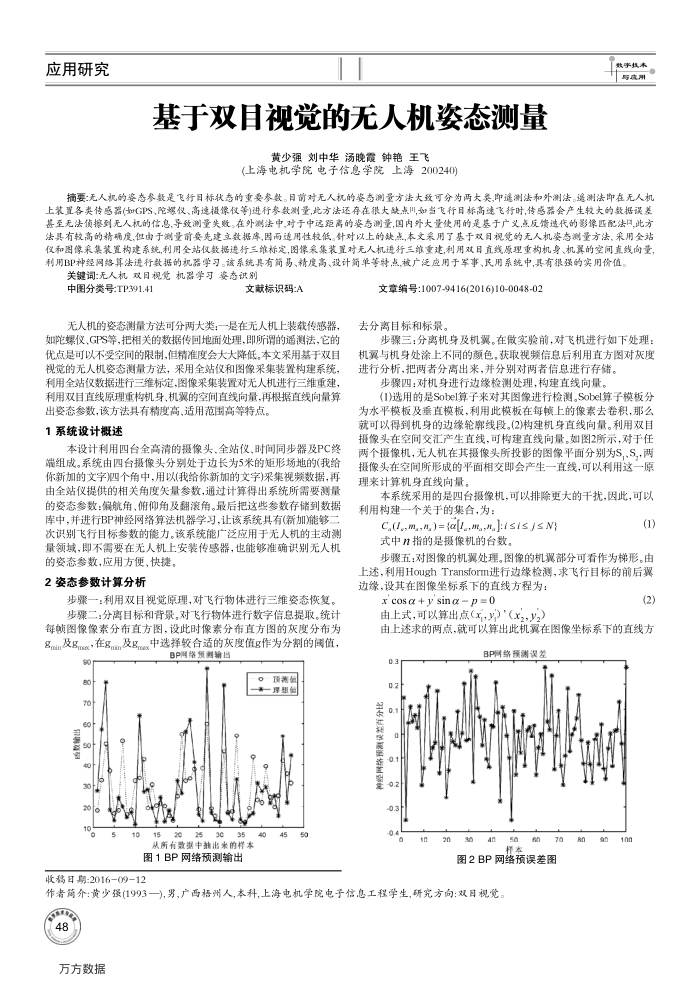
BP网络预别输B
90
80
15
20
25
36
35
0-预测售一理扭偿
50
从所有数据中油出未的样本图1BP网络预测输出
收移日期:201609-12
文章编号:1007-9416(2016)10-0048-02 去分离目标和标景。
步骤三:分离机身及机翼。在做实验前,对飞机进行如下处理:机翼与机身处涂上不同的颠色,获取视频信息后利用直方图对灰度进行分析,把两者分离出来,并分别对两者信息进行存储。
步骤四:对机身进行边缘检测处理,构建直线向量。
(1)选用的是Sobel算子来对其图像进行检测。Sobel算子模板分为水平模板及垂直模板,利用此模板在每慎上的像素去卷积,那么就可以得到机身的边缘轮哪线段。(2)构建机身直线向量。利用双目摄像头在空间交汇产生直线,可构建直线向量。如图2所示,对于任两个摄像机,无人机在其摄像头所投影的图像平面分别为S,,S,,两摄像头在空间所形成的平面相交即会产生一直线,可以利用这一原理来计算机身直线向量。
本系统采用的是四台摄像机,可以排除更大的干扰,因此,可以利用构建一个关于的集合,为:
C,(I,,m, n,)= (α[,ma,n, ]:f≤i≤ j ≤ N) 式中n指的是摄像机的台数。
(1)
步骤五:对图像的机翼处理。图像的机翼部分可看作为梯形。由上述,利用HoughTransform进行边缘检测,求飞行目标的前后翼边缘,设其在图像坐标系下的直线方程为:
x cosa + y'sinαp=0
由上式,可以算出点(x,)(x2,)
(2)
由上述求的两点,就可以算出此机翼在图像坐标系下的直线方
BP网络预测误益
0.3 0.2
空露提摄械 0
n
20
4n
50 样本
en
图2BP网络预误差图
作者简介:黄少强(1993一),男,广西梧州人,本科.上海电机学院电子信息工程学生,研究方向:双目视觉万方数据
100
上一章:基于指纹识别的图书馆借阅管理系统设计
下一章:基于数字化校园的手机客户端研究与设计