您当前的位置:首页>论文资料>双目立体视觉测量系统的设计与实现
内容简介
 总第214期 2012年第4期
总第214期 2012年第4期舰船电子工程
Ship Electronic Engineering
双目立体视觉测量系统的设计与实现
王建华12冯帆梁伟
王惠萍
(1.白求恩医务士官学校计算机教研室
石家庄050081)(2.军械工程学院光学与电子工程系
石家庄
Vol. 32 No. 4
107
050003)
依据双目立体视觉原理,对双目立体视觉测量系统的设计与实现展开研究,介绍了双目立体视觉测量系统的组成,对系统涉及
摘要
的主要关键技术进行了详细的探讨。结合相关硬件设备,利用VC6.0和Matlab软件开发平台实现了双目立体视党测量系统,经过实验验证该系统能够对运动物体的轴线三维姿态进行高精度的测量。
关键词
双目立体视觉;三维测量;摄像机标定;图像处理
中图分类号
TP391
DesignandImplementationofMeasurementSystemBasedon
BinocularStereoVision
WANG Jianhua-FENG Fanl LIANG Wei?WANG Huiping
(1. Computer Lab, Bethune Nursing Officier College, Shijiazhuang050081)
(2. Optics and Electric Engineering Department, Ordnance Engineering College, Shijiazhuang
050003)
AbstractAccording to the principle of binocular stereo vision, the design and implermentation of measurement system based on binocu-lar stereo vision is studied. The components of measurement system besed on binocular stereo vision are introduced and the relevant key tech-nologies of the systen are discussed in detail. A measurement system is built by using VC6, 0 and Matlab software development platform and relevant hardware equipment. Experiments indicate that this measuretmnent system can measure three-dimensional pose of moving object in high precision.
Key Wordsbinocular stereo vision, threedimensional measurement, camera calibration, image processing Class NumberTP391
引言
双目立体视觉测量技术(1~是计算机视觉研究领域的一个重要分支,是计算机视觉研究的重点和热点间题。双目立体视觉进行三维测量利用视差原理,对不同视角下获取的同一场景的两幅图像进行处理,从而恢复出空间物体的三维坐标信息。在双目立体视觉测量系统中,摄像机标定["]、图像特征点提取[4]和立体匹配技术[5-]是关键技术,直接影响着测量系统的精度。本文以测量运动物体轴线三维姿态为最终目的,建立双目立体视觉测量系统。该测量系统的技术路线是:首先,进行单个摄像机标定及立体标定,求取摄像机内、外部参数;然后,图像采集卡采集两路含有被测物体的同步图像信号至计算机内存,经图像处理分别得到两球心(标志物)在左右两摄像机图像平面上的像素坐标;最后,根据空间物点的三维重构原理,将两摄像机的特征信息进行融合,得到两球心的空间三维坐标,进面确定两球心连线的高低角和方位角,即被测物体轴线的空间三维姿态(在设置标志物时采用激光对准技术使两球心的连线与运动物体的轴线平行)。将该测量系统在VC6.0和 Matlab软件开发平台上进行设计开发,经过实验验证该系
统能够对运动物体的轴线三维姿态进行高精度的测量。
2
系统组成及工作流程
测量系统的硬件部分包括:9X9的黑白相间棋盘格模
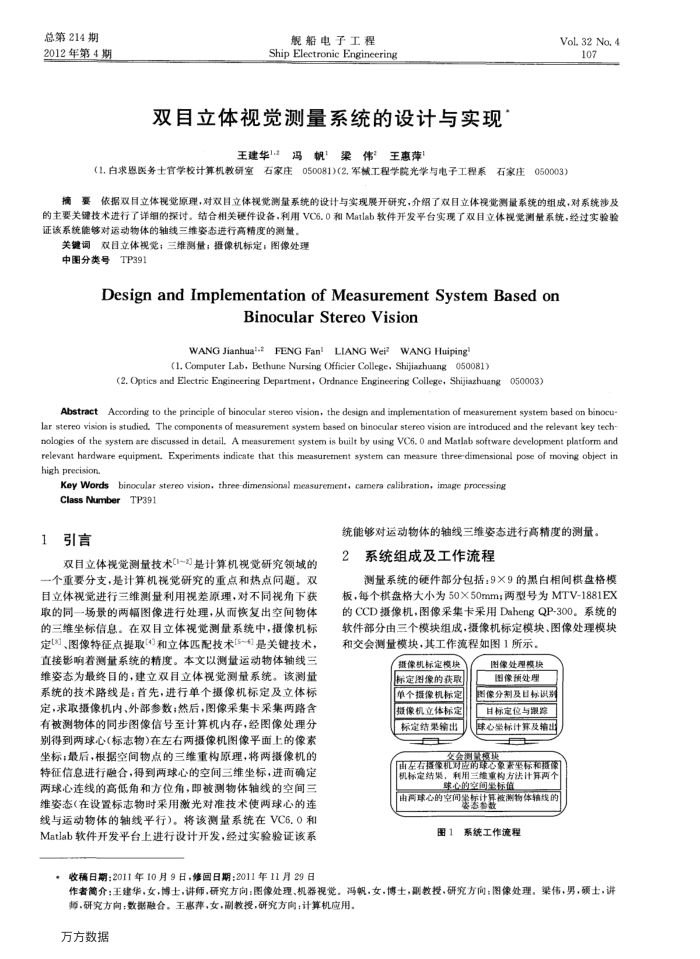
板,每个棋盘格大小为50×50mm;两型号为MTV-1881EX 的CCD摄像机,图像采集卡采用DahengQP-300。系统的软件部分由三个模块组成,摄像机标定模块、图像处理模块和交会测量模块,其工作流程如图1所示,
摄像机标定模块际定图像的获取单个摄像机标定摄像机立体标定标定结果输出
图像处理模块图像预处理图像分制及目标识别目标定位与跟踪球心学标计算及输出
交会测慧稳块
由左右摄像机对应的球心象素坐标和摄像机标定结果,利用三维重构方法计算两个
球心的空间坐标值
由两球心的室间要塞基基检需物体响线的
图1
系统工作流程
收稿日期:2011年10月9日,修回日期:2011年11月29日
作者简介:王建华,女,博士,讲师,研究方向:图像处理、机器视觉。冯帆,女,博士,副教投,研究方间:图像处理。案伟,男,硕士,讲
师,研究方向:数据融合。主惠,女,副教授,研究方向:计算机应用。万方数据