内容简介
 应用研究
应用研究基于 C/S 通讯模式的串联机器人研磨系统
贾春蓄1李彦清1刘建宇2韩春晓1冀品
(1.长春理工大学吉林长春130022;2.吉林省通化市恒诚建筑安装工程有限公司吉林通化134000)
摘要:通过网络编程接口Socket编制程序远程控制串联机器人和双目摄像机协调工作系统,在VC++6.0语言环境下实现串联机器人研度系统网络的应用。基于C/S模式的机器人系统中采用TCP/IP协议作为事联机器人与摄像机之间的通试协议,在事连机器人研系统的研房动作序列使用堆栈的管理形式,或功的进行了研地加工实验。经实验证明此种通讯协议可以更好的实境机器人在日常加工中的工作要求,提高劳动生产效率,系统运行稳定,系统的实时性较高,已达到了满足C/S通讯模式的事联机器人研度系统的通道讯需求
关键词:事联机器人研度TCP/IP协议C/S模式中图分类号:F416.67;TP242.2
文献标识码:A
1、序言
近儿年来,随着科技的高速发展,人们对生产效率要求的越来越高,因面在机器人额域的研究更具现实意义,现在我国应用在工业生产上的机器人无一例外都是固定在加工设备旁或者是生产线附近不可移动作业的大大降低了其应用价值,在先人的经验基础上,通过对串联机器人通讯模式及网络协议的设计,将双目摄像机与串联机器人有机的结合在一起,实现机器人在日常加工中的工作要求,提高劳动生产效率,系统运行稳定,该系统的实时性较高,已
双目渠像机系统
中联机器人系统
强流人限器客户机
股务器
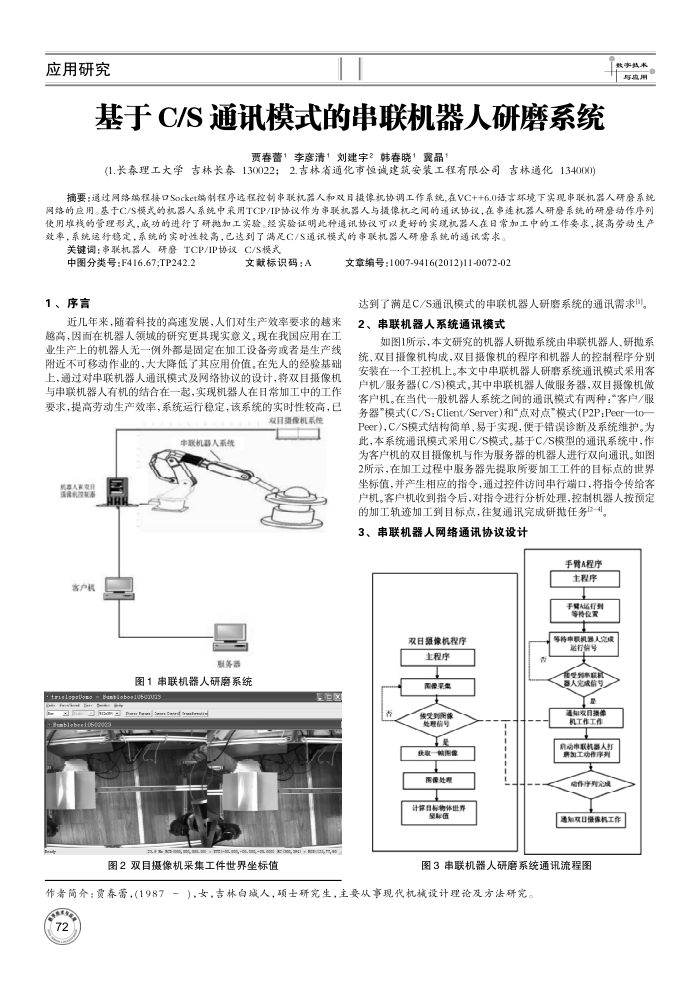
图1审联机器人研磨系统
: trislopeDono Bemblobos10602023
恒区
, 0 - 81, 75,8
图2双目摄像机采集工件世界坐标值
文章编号:1007-9416(2012)11-0072-02
达到了满足C/S通讯模式的申联机器人研磨系统的通讯需求。 2、串联机器人系统通讯模式
如图1所示,本文研究的机器人研揽系统由串联机器人、研揽系统、双目摄像机构成,双目摄像机的程序和机器人的控制程序分别安装在一个工控机上。本文中串联机器人研癌系统通讯模式采用客户机/服务器(C/S)模式。其中申联机器人做服务器,双目摄像机做客户机。在当代一般机器人系统之间的通讯模式有两种:“客户/服务器"模式(C/S:Client/Server)和"点对点"模式(P2P:Peer一to Peer),C/S模式结构简单,易于实现,便于错误诊断及系统维护。为此,本系统通讯模式采用C/S模式。基于C/S模型的通讯系统中,作为客户机的双目摄像机与作为服务器的机器人进行双向通讯。如图 2所示,在加工过程中服务器先提取所要加工工件的目标点的世界坐标值,并产生相应的指令,通过控件访问串行端口,将指令传给客户机。客户机收到指令后,对指令进行分析处理,控制机器人按预定
的加工轨迹加工到目标点,往复通讯完成研批任务2-4 3、串联机器人网络通讯协议设计
手臂A程序主程序
于的
双日驱像机程序
主程序西像草集发受到用像整型费
快取销图像图像处理计第目标物体世界 skd
等特申取机器人完成
送行编号专机品人完成信
通知表目摄带机工作工作
启动中联机器人行房加工动香序列
电序型减通知双口缓像机工作
图3申联机器人研磨系统通讯流程图
作者简介:贾春蓄,(198了一),女,吉林白城人,硕士研究生,主要从事现代机械设计理论及方法研究。