基于免疫算法神经元自适应的汽轮机转速控制研究
内容简介
 数事载本与真用
数事载本与真用基于免疫算法神经元
自适应的汽轮机转速控制研究
赵效辉孙研刘超张继超
(东北电力大学自动化工程学院吉林吉林132000)
数控技术
摘要:汽轮发电机组的控制贯穿于电力生产的始终其控制效累直接关系到电网供电质量及机组的安全、稳定、经济运行。本文采用免疫算法对加权函数进行选取,利用免疫算法的全局推索性能通过一系列的免度操作寻我最优的加权函数。仿真结果表明,免疫算法对提高鲁棒控制系统的控制效果具有一定的有效性。
关键词汽轮机控制数学建模神经元自适应免度算法
中图分类号:TP273;TK32
文献标识码:A
汽轮机的工作原理是依据蒸汽为主要依托的。同时,汽轮机在各行各业都有着广泛的应用和发展。在火力发电厂的主要工作部分中,汽轮机是主要的三大主机中的特别重要的一个山它的主要作用
是用于带动发电机旋转,产生我们需要的电能。 1神经元自适应PID控制
1.1采用有监肾的Hebb学习算法
这种控制方法是目前最常用的神经元自适应PID控制法,应用十分广范。当采用有监督Hebb学习算法时为了保证该学习算法的收敏性和控制的鲁棒性,对上述算法规范化处理可得到";
n(2) =(1)+ K≥;(),()
e,(e)
()=
(
,( + 1) = m (k) + n),=(&)(k)x, (8) 0, (k + 1) = (0, () + 7),2(8)(k)x, (k)[, (+1) =0,()+。二()(t),(t)
(11)
2(k)=r(k)-y(k)=e(k)为神经元输出误差信号,,、,、。分别表示比例、积分、微分的学习率。由以上公式可知,各输人量的权重值可以通过上述学习规则来自动调节,来适应被控对象的状态变化。神经元控制器可以看成一个变系数的自适应控制器1-)
,(8) = r(K) y() = e(k)
其中,(t)=e(e)
, (k) = e(k) 2e(k 1) + e(K 2)
(12)
此种控制方法比传统PID控制的响应速度快一些,超调也比传
PID参数作为抗原的价精体计算适应度值计算浓度
衡体的更新
嘉传染作(交叉变异》得到量们PD控制参款
滨业配记重
图2-1免疫算法优化神经网络流程图
收稿日期:201503-14
文章编号:1007-9416(2015)03-0009-02
统PID控制器小一些,但在某些情况下出现收敛过慢的问题,鲁棒性不好。本文采用一种新型的神经元PID控制方法
以输出的误差
平方为性能指标的神经元自适应PID控制,并对这种控制方法加以了改进。
1.2改进的神经元自适应PID控制
在神经元PID中应用输出误差平方的性能指标,引入的性能指标函数如式(1-3)所示:
[(k + 1) (k + F = 1
2(+1)
(13)
使系统沿着二次型性能指标函数J的负梯度方向来调整,即:
w,(4) =-): w,(k)
(k+1)
a
n, K2(k + 1)sgn(
)x.(k)
Cu(k)
其中
a
Oy(k + 1) Cu(k)
= 2(k + 1):
(14)(15)
ow,(k)
Cu(k)Cw,(k)
上式中n表示学习速率(i=I,P,D)。由于在神经元算法中,通常未知,因此可以近似用符号函数(+))
)来代替,由此可
afa
以通过调整学习速率,来对计算不精确的影响进行补偿。在实际控制中发现权系数的修改与ek-2)关系很小,而且由于e(k-2)的存在使计算量增大,造成收敛速度变慢许多,参数的在线学习修正主要与e(k)和Ae(k)有关。即将x,(k)改为(e(k)+Ae(k)),调整后的算法变得更加简单,改进后的算法如下所示:
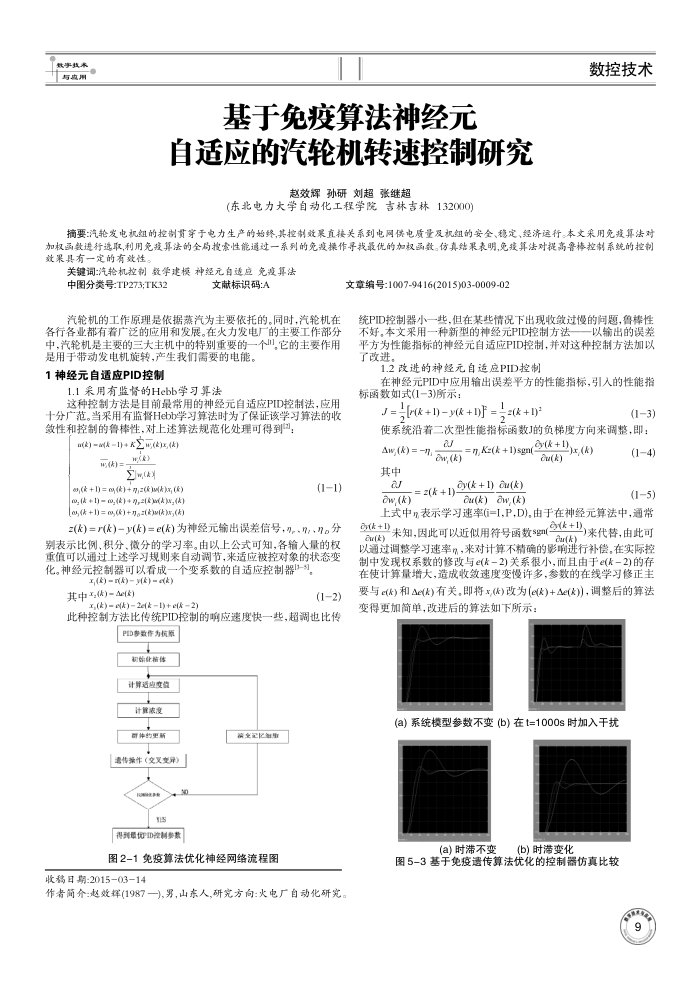
(a)系统模型参数不变(b)在t=1000s时加入于扰
(a)时滞不变
(b)时滞变化
图5-3基于免疫遗传算法优化的控制器仿真比较
作者简介赵效辉(1987一),男,山东人,研究方向:火电厂自动化研究。
上一章:电站引风机汽轮机驱动可行性分析
下一章:高背压汽轮机拖动造气风机运行小结