��������Ӧģ�����Ƶ�����������ˮλ�����о�
���ݼ��
 ��ѧ�ȱ������
��ѧ�ȱ���������ؼ���
��������Ӧģ�����Ƶ�����������ˮλ�����о�
���
(���Ƹ�ְҵ����ѧԺ�������Ƹ�222000)
ժҪ��Ϊ���ܹ���Ч�ؿ���������������ˮλ��ȷ���˵糧�ܹ���ȫ�ɿ��ع�����������о�������Ӧģ�����������е�Ӧ�á����ȣ�����������������ס����ģ�ͣ���Σ�������ģ������ӦPID����ϵͳ����ƣ����ţ�������ģ�PID�������IJ�����ʼ�������������ģ��PID ����������ģ�ڻ������̣�������˷����������������֤�˸÷�������Ч�ԡ�
�ؼ�����ģ������PID��������������ˮλ����
��ͼ����ţ�TP273.2
���ױ�ʶ�룺A
���±�ţ�1007-9416(2012)09-0001-02
���ܷ�������ҹ���Դս�Ե�˳����չ���зdz��ؼ��Ĵٽ����ã�������������ȫ����Ӧ��������ռ�ı����������ӣ����ܷ����ڵ�����ҵ�е���Ҫ��������ͻ�ԡ�������������ѹˮ�Ѻ˶���װ���еĹؼ��豸��������������ˮλ�Ŀ��ƾ����ź˵�վ����Ŀɿ��ԡ�Ϊ���ܹ�ȷ���˵糧����ȫ�ɿ��ع�����Ӧ�ý�������������ˮλ������һ���ķ�Χ�ڣ����ˮλ���ߣ���������ˮ����Ч������������Ʒ�ʵ��½����Ӷ������ֻ���ҶƬ�����в����ˮλ����ʱ������������ˮ���������ڸ�ˮ�ܵ��γ��������Ӷ���������������ܵĽ��ͣ���ɹܰ�ij��������������ˮλ���ƾ��зdz����ӵķ������ص㣬��ˣ�������������ˮλ���ƱȽ�Χ�ѡ�Ŀǰ��������������ҪPID���Ƽ���������PID���Ƽ����ڴ��������Կ��ƶ���ʱ��������õĿ���Ч������ˣ�Ӧ������һ�ָ�Ϊ��Ч�Ŀ��Ʒ���������������ˮλ���п��ƣ���ģ���������ۺʹ�ͳ��PID���Ƽ�����������γ�PID���Ƽ������п���Ч�ʸߣ��ɿ��Ըߵ��ص㣬�ܹ������ڷ����Զ���Ŀ��ƣ����Խ�ģPID����
����Ӧ��������������ˮλ�����С� 1������������ˮλ����ģ��
����������������ģ��������ʾ��
0.003
4
G_(s) =
s(8s +1)
G,(s) :
0.003
4s+1 0.02
0.0002
G,(s)=
10s +1s(10s +1)
G, (s):
1 4s +1
Ag = 0.2 D=W=35
(1)(2)(3)(4)(5)(6)
ʽ�У�G,(s)��ʾ�������Ľ�Ծ��Ӧ�Ĵ��ݺ�����G,(s)��ʾǰ�����ݺ�����G��(s)��ʾ����������Ծ����Ӧ�Ĵ��ݺ�����>����ʾ��ˮ�����������ı���ϵ����D��ʾ����������W��ʾ��ˮ������
����
ģ�ڻ�
R(S)
PID������
()
S��ʾ������˹���ӡ�
2��ģ������ӦPID����ϵͳ�����
ģ�����Ƶ����ۻ�������ģ��������ģ�����Ϻ�ģ���������ۣ��ÿ��Ʒ����Ļ���ԭ���ǰ����˵�����֪ʶ�Ա��ض���������ܿ��ơ�ģ�������ܹ���������������ˮλ���ƵĻ����������п�����ƣ����ؿ�������������ˮλ����ϵͳ�ľ�ȷ��ѧģ�ͣ�����ģ�����Ƽ����ܹ�Ӧ������������ȷ��ѧģ���Լ�����Ϣ���������²����IJ�̬������������ˮλ����ϵͳ�Ŀ���֮�У������ܹ�ʵ�ֶ�Һѹϵͳ�ľ�ȷ���ơ����ǣ�ģ��������������̬����˿��Խ�ģ���������˵�PID���Ƽ����У�����ģ������ʵ�ֶ�PID �������IJ���ʱʵ�ص������Ӷ��ܹ���ֵؽ��ģ�ƿ��Ƽ�����PID ���Ƽ������ŵ㣬ʹ����������ˮλ����ϵͳ�Ŀ��ƾ��нϺõĶ�̬�;�̬�����������������������ˮλ����ϵͳ���ƵĿɿ��ԡ�
ģ��PID���Ƽ������Խ�ģ�������Լ���Ӧ�Ŀ���Ԥ�ȴ洢���������֪ʶ���У�������ܹ���������������ˮλ����ϵͳ����Ӧ������������ȴ洢��֪ʶ�����ģ��������ʵ�ֶ�PID������������ʵʱ�������Ӷ�������Ч�ؽ�ģ�������Լ�PID���Ƽ������������
ģ�����������������룬�ֱ������e�Լ����ı仯��ec������ģ�����ƶ�PID�������IJ����������ߵ��ڣ��Ӷ����Ի�� PID�����������������ı仯�����ֱ��DZ���ϵ��<��������ϵ��k����ϵ��k�������մﵽ���Ԥ��ֵ��Ŀ�ġ�
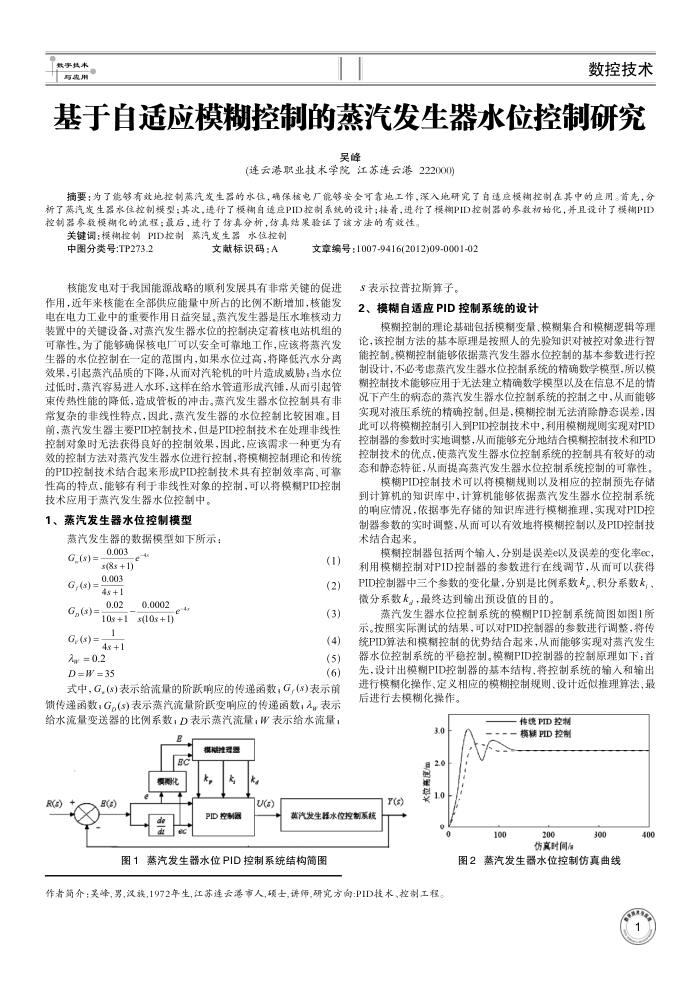
����������ˮλ����ϵͳ��ģ��PID����ϵͳ��ͼ��ͼ1��ʾ������ʵ�ʲ��ԵĽ�������Զ�PID�������IJ������е���������ͳPID�㷨��ģ�����Ƶ����ƽ���������Ӷ��ܹ�ʵ�ֶ�����������ˮλ����ϵͳ��ƽ�ȿ��ơ�ģ��PID�������Ŀ���ԭ�����£����ȣ���Ƴ�ģ��PID�������Ļ����ṹ��������ϵͳ��������������ģ����������������Ӧ��ģ�����ƹ�����ƽ��������㷨��������ȥģ����������
3.0 1.0 Y(s)
Ī��������ˮλ����ϵͳ
0
ͼ1����������ˮλPID����ϵͳ�ṹ��ͼ
����飺�ط壬�У�����,1972�������������Ƹ�����,��ʿ,��ʦ,�о�����:PID��ˮ�����ƹ���
100
��ͳPID����ģ��PID����
200
����ʱ��/s
300
ͼ2����������ˮλ���Ʒ�������
400