����ARM������ʽ������·�����������
���ݼ��
 �����������Զ���
�����������Զ�������ҵ��Ϣ��
2017���2��
����ARM������ʽ������·�����������
������ح�ε¾�������ŷ��1�����
��1.�Ĵ���ѧ�����ѧ�빤��ѧԺ�ɶ�610065�� 2.�����ڴ�Ƽ�Һѹ������˾����646003��
ժҪ���ݹ��̻�е�ж�"�ֶ����Զ���һ����ơ�Զ�̿��ơ��������ܵ������ڶ�·��ԭ���ֶ����ƵĻ����ϣ��������Ը��ٿ��ص���Ϊ�ȵ���������ʽ���ƣ���Ƴ�һ�ֻ���ARM-Cortex-M3�ں˵Ŀ����������Ը�������ʵ���ֶ����ơ��Զ����ơ�Զ�̿��Ƶ��л����ÿ��������ñջ����ƣ���PID���ڽ��ȷ�����PWM�ź����ڵĸ�����ռ�ձȣ�PWM�ź��������ٵ�ŷ�ʵ�ֶԶ�·����о�Ŀ��پ����ƣ�ͬʱʵ�ֶ�Һѹϵͳ��
����ִ�л������ٶȿ��ƣ����ٶ�·�����ģ��ﵽ�������ܵ�Ч�����ؼ��ʸ��ٵ�ŷ���·��ARMPWMPID
���Ź��̻�е����������Һѹ��е�Ը�Ч���������ܡ���̼������Ҫ���������ߣ�ԭ����ʽ��ͨ���ṹ�Ķ�·�����ڸ�ѹС���������»��г̵�λ��ѹ������ʹ��������������ѹ��Һͨ�������ڷ������䣬����Ĺ��ʣ��ּ�����Һ��ʹ����Һѹϵͳ���ʶ���˸��ɸж�·����Ϊ�����Ͳ�ѹ���Ƽ������첽��Ϊ�������̻�е����ѡ������ȫ���ƹ�֮�ơ�����95%���ϵ����ʽ���ɽɸж�·�������õ¹�Rexroth������Husco��Danfoss������Amca�ȹ�������Һѹ���̲�Ʒ������ڸ���Һѹ��е���Ʒ�ַ���Ҫ����죬�ҹ����Ʒ�۸�Ӹߣ��������ڳ����Ҹ��ɸж�·��ά���Ѷȴ�������ƹ�Ӧ���������ϴ����ѡ�
���ڸ��ٿ��ص�ŷ���Ϊ�ȵ����Ƶ�����ʽ��·�����߱�����ʵ��Զ�̻������˻����ݡ��ṹ������ά�����ס�����Ⱦ����ǿ�����ܻ������ŵ㣬���ֲ���Һ��������Ӧ�ٶ��������ƾ��ȵ͡�ά���ɱ��ߵ�ȱ�ݡ����Ľ��ģ������Ӧ����PID �㷨��PWM�ź��������ٿ��ص�ŷ�)����Ƴ�һ�ֻ���ARM-Cortex-M3�ں˵�����ʽ��·����
������ 1
���ڸ��ٵ�ŷ��ȵ�����ԭ��
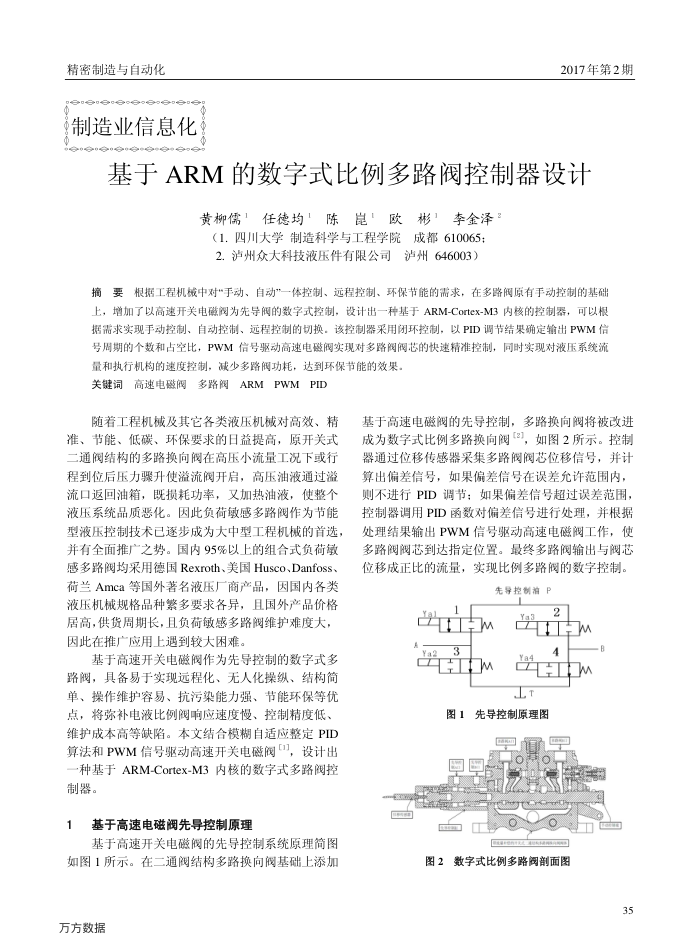
���ڸ��ٿ��ص�ŷ����ȵ�����ϵͳԭ����ͼ��ͼ1��ʾ���ڶ�ͨ���ṹ��·������������������
���ڸ��ٵ�ŷ����ȵ����ƣ���·�������Ľ���Ϊ����ʽ������·����2)����ͼ2��ʾ��������ͨ��λ�ƴ������ɼ���·����оλ���źţ��������ƫ���źţ����ƫ���ź������������Χ�ڣ�����PID���ڣ����ƫ���źų�����Χ������������PID������ƫ���źŽ��д����������ݴ���������PWM�ź��������ٵ�ŷ�������ʹ��·����о����ָ��λ�á����ն�·������뷧оλ�Ƴ����ȵ�������ʵ�ֱ�����·�������ֿ��ơ�
�ȵ�������P
2
2 4
LT
ͼ1�ȵ�����ԭ��ͼ
����
����
1OuO
H ͼ2����ʽ������·������ͼ
35