您当前的位置:首页>论文资料>数控车床纵向伺服系统传递函数的推导
内容简介
 数控技术
数控技术数控车床纵向伺服系统传递函数的推导
与克
金立从蒋晓刚2
(1.江西九江职业技术学院建筑工程学院江西九江
332007;2.江西九江职业技术学院机械学院江西九江332007)
摘要:本文阐逐了把CA6140告通车床改造成数控车床时,考虑电机实际工作在转速经常变化、频整起动和制动的条件下,电机的时间常数是很重要的性能指标,因此和时间常数有关的惯性负载和阻尼负载必须考虑。本论文息略弹性负载的计算,建立了疆场四路方程和电机辑的运动平衡方程,对善通车床数控改遗的纵向伺服系统传强西数的推导进行描述。
关键词:普通车床双向何服系统传递函数中图分类号:TP273
文献标识码:A
文章编号:1007-9416(2015)12-0014-01
Abstract:The article is about in the process of converting CA6140 Lathe into CNC Lathe, considering the Electric machinery in different working conditions of rotate speed changing, frequent starting and frequent braking, The time constant of the motor is very important. Therefore, the inertia lkoad and the damping load must be considered. This paper mainly described the derivation of the transfer finction of the longitudinal servo system for the numerical control of the lathe, The equation of the magnetic field loop equation and the motion equation of the motor shaft is established while the calculation of the elastic load is neglected.
Key Words:common lathe vertical servo system transfer fiunction
1概述
将一台CA6140普通车床改造成微机数控车床,采用8031系列单片机控制系统,步进电机开环控制,具有直线和圆弧插补功能,具有升降速控制功能。当考虑用吉典式控制方法实现何服进给控制时,利用率闭环控制系统,实现纵向进给和横向进给的自动控制。由于考虐电机实际工作在转速经常变化、额警起动和制动的条件下,电机的时间常数是很重要的性能指标,因此和时闻常数有关的惯性负载和阻尼负载首先必须考虑,为简化推导和只说明设计过程,固面本论文忽略弹性负载的计算。对善通车床数控改造的纵向伺服系
统传递函数的推导进行描述。 2纵向进给伺服系统组成
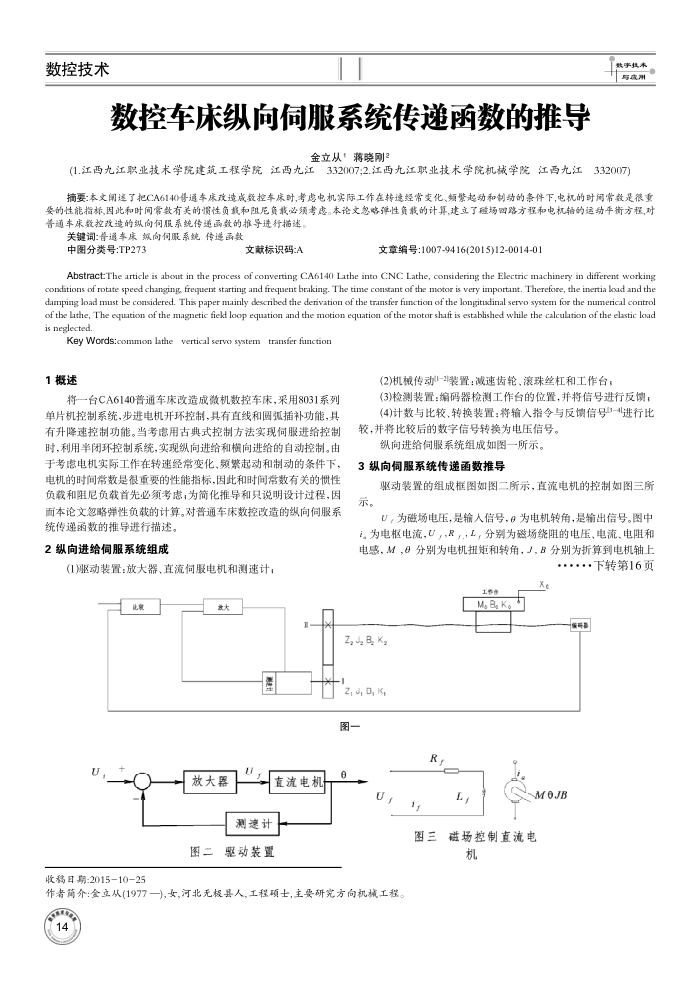
(1)驱动装置:放大器、直流伺服电机和测速计
北
收稿日期:2015-10-25
这大
(2)机械传动I-2装置:减速齿轮,滚珠丝杠和工作台:
(3)检测装置:编码器检测工作台的位置,并将信号进行反馈;(4)计数与比较、转换装置:将输人指令与反馈信号3-4进行比
较,并将比较后的数字信号转换为电压信号。
纵向进给间服系统组成如图一所示。 3纵向伺服系统传递函数推导
驱动装置的组成框图如图二所示,直流电机的控制如图三所示。
U,为磁场电压,是输人信号,为电机转角,是输出信号。图中 i。为电枢电流,U,,R,,L,分别为磁场绕阻的电压、电流、电阻和电感,M,分别为电机扭矩和转角,J,B分别为折算到电机轴上
.・・下转第16页
工e业
MaB, K。
Z, d B, K, Z, J, D, K,
图一
R
放大器
图三
直流电机
U
测速计
驱动装置
作者简介:金立从(1977一),女,河北无极县人,工程硕士,主要研究方向机械工程。
1
图三
X
MeJB
磁场控制直流电机
上一章:M7130平面磨床排故系统设计
下一章:一种低成本自动翻身床的设计与实现