您当前的位置:首页>论文资料>一种低成本自动翻身床的设计与实现
内容简介
 设计开发
设计开发一种低成本自动翻身床的设计与实现
郎丰法曹银态谢星海
(聊城大学物理科学与信息工程学院山东聊城252059)
摘要:针对白动翻身床操作繁项、售价较高的同题,设计一种基于STC5628AD的低成本自动翻身床。通过将12块床板较链相接,设计出具有左右翻身、起空及指髓功能的床板。利用STC12C5628AD做为控制核心,通过来集起坐、左右翻身、格腿角度数据,利用电动推杆作为动力,实现自动左右翻身和拾题功能。既解决了自动翻身来的自动控制问题,又实现了整体设计的低成本控制。
关键调:自动翻身STC12C5628AD单片机电动推杆角度传感器床
中图分类号:TP273+.5文献标识码:A 引言
文章编号:1007-9416(2012)04-0130-03
盘,3路10位A/D输入,时钟及遥控接收输人,输出端包括4路光电隔
世界上约有700万摊痪病人,中国约有140万",而随着社会老龄化的发展,对生活不能自理者的护理已成为一个值得重视的社会问题。针对这种情况,国内外研制出了多种可供病人翻身、起坐的专用床。这些专用床,满足了部分护理需要,但这些产品往往存在着价格贵,结构复杂,机构运动空间受限,侧翻角度较小,翻身效果不够理想等问题。我们设计了一种结构简单,使用方便、造价低廉,适合于一般的医院及家庭使用的自动翻身床。卧床病人或护理人员可通过遥控器或键盘完成起坐、左右身和抬服控制。若病人需定时翻身,可由护理人员将自动翻身床设
定为自动翻身护理模式,实现无需护理人员的自动翻身功能。 1、床板设计
为使床板具有左右翻身、起坐、抬腿功能,且不同功能间互不影响,床板设计为12部分铰链面成,其结构如图1所示。
1 2 3
5
中 8
图1自动翻身床床板结构示意图
10 11 12
图1中左侧为床头,右侧为床尾。左翻身时床板1、2、3、4.5、7、8 10.11部分抬起,右翻身时2.3.5、6.8,9、11.12部分抬起,起坐时1 2.3部分抬起,抬脂时7、8.9部分与10、11、12部分中间抬起。左右翻身倾角传感器置于床板5下,起坐倾角传感器置于床板2下,抬腿频角传感器置于床板8下。起坐,左翻身、右翻身及抬腿由4个独立的电动推杆驱动。电动推杆动作机构结构如图2所示。其中A转轴固定于床体,支撑杆可绕A转轴转动,C转轴固定于床体,B转轴固定于支撑杆之上。工作时,电动推杆通过推动B转轴带动支撑杆绕A转轴施转,从而推动相关床板,实现起坐、翻身、抬腿功能。
单
支据杆
C转轴
OA转轴电动推杆
图2自动翻身床电动推杆连接示意图
2、控制系统设计
2.1控制系统硬件设计及关键电路实现
硬件系统以STC5628AD单片机为核心,输人端包括8路4×4键 30
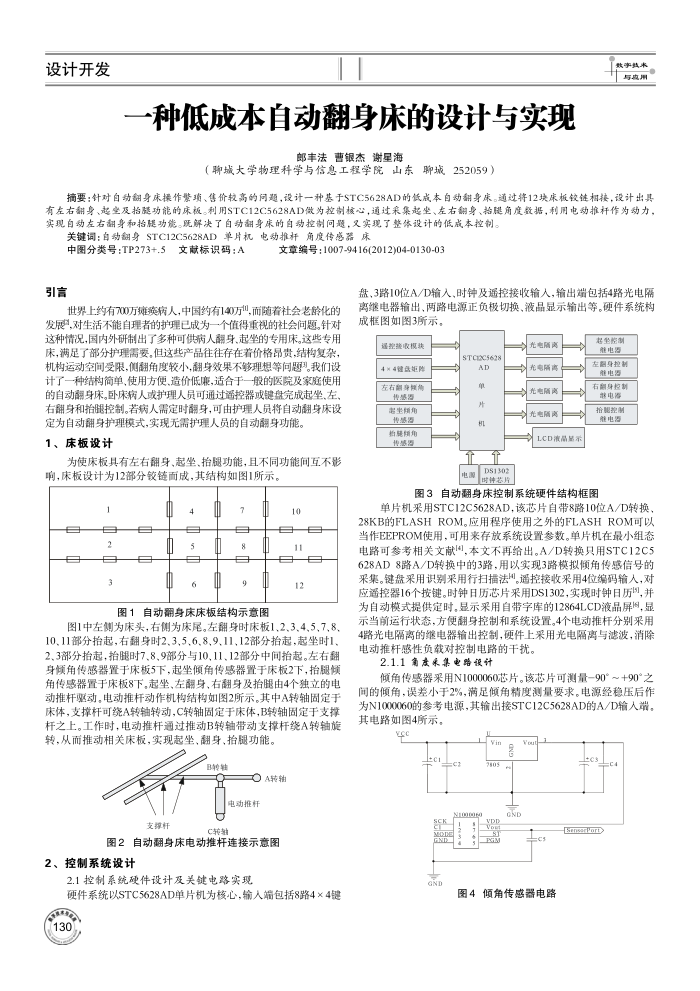
离继电器输出、两路电源正负极切换、波品显示输出等。硬件系统构成框图如图3所示。
遥控整收模 4×4键盘距降左右翻身规角传感酒超尘预角传感酒治频角费费况
STC12C5628
AD 机
电商产光电隔高光电隔离电陷高
1L.CD液品益示
者生差制胜电话显身控制胜电话右制身控制能电话拾服控制维电器
图3自动翻身床控制系统硬件结构框图
单片机采用STC12C5628AD,该芯片自带8路10位A/D转换, 28KB的FLASHROM。应用程序使用之外的FLASHROM可以当作EEPROM使用,可用来存放系统设置参数。单片机在最小组态电路可参考相关文献叫,本文不再给出。A/D转换只用STC12C5 628AD8路A/D转换中的3路,用以实现3路模拟倾角传感信号的采集。键盘采用识别采用行扫描法用。控接收采用4位编码输人,对应遥控器16个按键。时钟目历芯片采用DS1302,实现时钟目历3),并为自动模式提供定时,显示采用自带字库的12864LCD液品屏围,显示当前运行状态,方便翻身控制和系统设置。4个电动推杆分别采用 4路光电隔离的继电器输出控制,硬件上采用光电隔离与滤波,消除电动推杆感性负载对控制电路的干扰。
2.1.1角度采集电路银计
倾角传感器采用N1000060芯片。该芯片可测量-90°~+90°之间的倾角,误差小于2%,满足倾角精度测量要求。电源经稳压后作为N1000060的参考电源,其输出接STC12C5628AD的A/D输人端。其电路如图4所示。
Es
GND
图4倾角传感器电路
上一章:数控车床纵向伺服系统传递函数的推导
下一章:机床数字控制系统的发展