您当前的位置:首页>论文资料>电动机驱动电流依赖于可观测量的数学模型
内容简介
 电动机驱动电流依赖于可观测量的数学模型作者/刘红巧、王泽杰(通讯作者),济南大学
电动机驱动电流依赖于可观测量的数学模型作者/刘红巧、王泽杰(通讯作者),济南大学电子科技
搞要:用差分方程建立数学模型(引用参考文献(),得到了主轴的角加速度,再根据现有的物理模型,求出补偿需要的输出的转矩,得到电动机转矩与电流的线性关系,已知试验台工作时主轴的瞬时转速与瞬时扭矩是可观测的离散量,建立电动机驱动电流依赖于可观测量的数学模型。把等效转动惯量与机械转动惯量当作可观测值。因为驱动电流是电动机扭矩的1.5倍,求出扭矩即可得出求出驱动电流。扭矩问题可转化为转动惯量与角加速度的问题,故最终建立的驱动电流的模型,只需找到角加速度的表达式,利用差分模型可以表达求解。
在制动加速度是常量的基础上,我们可以计算出减速过程中的加速度。由上述所得的加速度我们可以推导出加速度与角加速度之间的关系,进而求出角加速度的值,最后代入求出电动机的扭矩。
关键词:差分方程数学模型;驱动电流的模型;粗大误差数据分析
1,问题提出
制动器试验台对于检测车辆安全及性能有着重要意义:它的作用是让形势的车辆减速或者停止,它保证了制动器在设计及生产过程中的可靠性,保障了我们的人身财产安全,因此制动器的设计是车辆设计中最重要的环节之一。为了检验制动器器的好坏,需要进行测试。由于车辆再设计过程中无法进行路试,因此需要进行模拟测试。为了试验的准确性,实验台的设计要尽可能地符合实际情况。本文对控制器的控制方法进行深入研究,建立数学模型,以达到更好的模拟仿真效果,为设计、生产提供更准确的数据。
2.模型的建立与计算求解 ■2.1差分方程的建立
用差分方程建立数学模型(3),得到了主轴的角加速度,再根据现有的物理模型,求出补偿需要的输出的转矩,根据电动机转矩与电流的线性关系。
试验台主轴的瞬时转速与瞬时扭矩是可观测的离散量则可以得到此时刻的转速n:一时刻的转速为。设角加速度为α,离散化后的时间段t为-f。-,-1,建立差分模型。
根据物理公式0一三0
2rn,2#n,得到
=α
60
60
推广2n
60
2#m,-
=,n 60
G=2元m-2m
60r
2#n,2.,-
60t
M,=J,o
由公式
M
=1.5.4/ N-m
得到差分方程(1)
1, =1.5J,
万方数据
(2Rn,2n-)
60r
(1)
■2.2图像绘制与控制方法评价 2.2.1绘制二维图
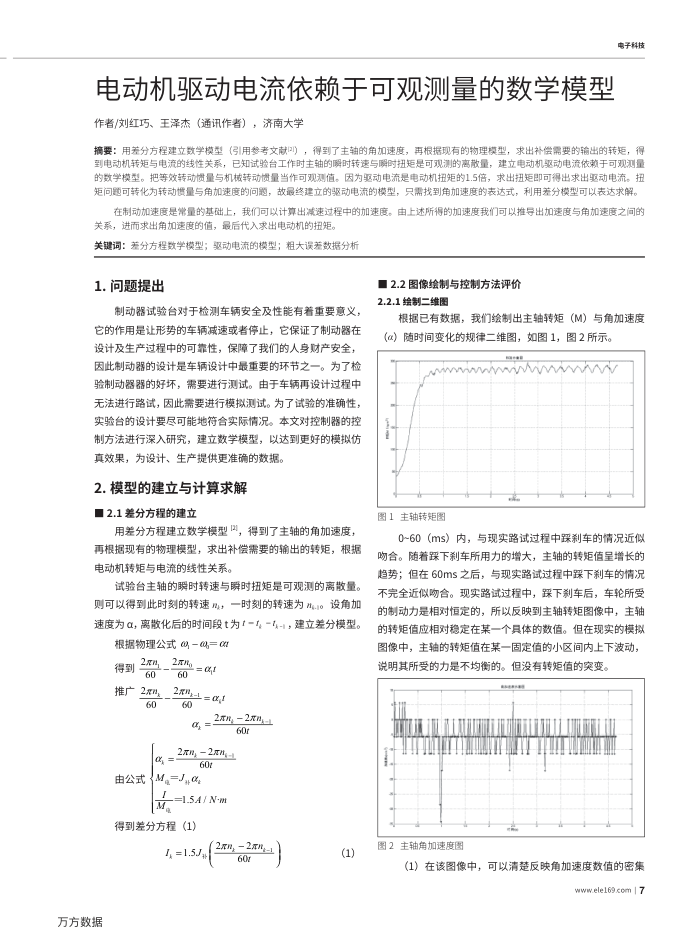
根据已有数据,我们绘制出主轴转矩(M)与角加速度(α)随时间变化的规律二维图,如图1,图2所示。
ww
图1主轴转矩图
0~60(ms)内,与现实路试过程中踩刹车的情况近似吻合。随着踩下剃车所用力的增大,主轴的转矩值呈增长的趋势;但在60ms之后,与现实路试过程中踩下刹车的情况不完全近似吻合。现实路试过程中,踩下刹车后,车轮所受的制动力是相对恒定的,所以反映到主轴转矩图像中,主轴的转矩值应相对稳定在某一个具体的数值。但在现实的模拟图像中,主轴的转矩值在某一固定值的小区间内上下波动,
说明其所受的力是不均衡的。但没有转矩值的突变。图2主轴角加速度图
(1)在该图像中,可以清楚反映角加速度数值的密集
www.ele169.com 17
上一章:电动机电流过载保护设计
下一章:程控交换机的维护及管理探析