您当前的位置:首页>论文资料>基于微网运行PQ控制系统研究
内容简介
 科技论坛
科技论坛基于微网运行PQ控制系统研究
罗心宇索亚楠俞景康张武郭诚(安徽理工大学电气工程学院,安搬淮南232001)
・149・
摘要:该文章建立了微网适行并网的PO控制仿真系统,通过电流控制有功功率和无功功率,降低了一些容易受到外界环境干扰的分布式发电供电过程中的不足,达到了保证微网运行最大输出功率的目的。而且与微电网中加入大容量存储装备相比大大节了适行成本,
关键词:微网;分布式发电;恒功率控制 1概述
微网系统运行分为并网和孤岛两种运行方式,并网是指微网系统与大电网相连接,向电网提供能量或者大电网向微网提供电能弥补缺额,是一种电能的双向流动。孤岛运行则是当大电网发生故障难以满足用户要求时,此时微电网与大电网断开连接,微电网系统独立运行,又分布式发电机单独向负载和用户供电。
2恒功率(PQ)控制概念及原理
在分布式发电中,包含着光伏分力这种很容易受到外界环境影响的发电方式,其有很强的随机性,若是任由其随机发电将会对大电网和用户产生很大的危害。为了解决这样的间题可以配备大容量的存储设备,但是这类设备的费用很高,大幅度增加了运行成本
恒功率(PQ)控制是处理这类间题较为明智的方法。所调恒功率控制就是把分布式发电机看做负载,统一接受控制系统的电压和功率的分配和调用,按照其本身所设置的有功功率和无功功率运行。
并网逆变器输出的三相电压为u,幅值为U.,则
t. t:
U.coswt
U_.cos(wt-U_cos(wr
u经过左边变换变为U,,U,
3
0
由上式可见在旋转d坐标系下,d轴分量和g轴分量不存在榈合关系,同理可对递变器输出电流进行坐标变换可得1、l,此时的脱时有功和无功功率可以表示为
P=U.I.+U,I o-U.IU.l
即
. 0 I, . U
由此便可以得到d坐标系下的电流对有功和无功功率的控制关系,即有功功率P有I决定,无功功率Q由I决定。
取逆变器输出电压Us,有KVL可得,
U=,R+
k+ ip
由变换矩阵T3s/2r变为dg坐标系下,上式可化为
U%=U+
wLI,+LR p
令
上式化为同理可得
U=+R
p
bIm+"n+"n="n U=U+wLld
由该式可得到PQ控制的框图。如图2。
通实荐
ZEZ
图1PQ原理结构框图
PA
图2PQ控制框图
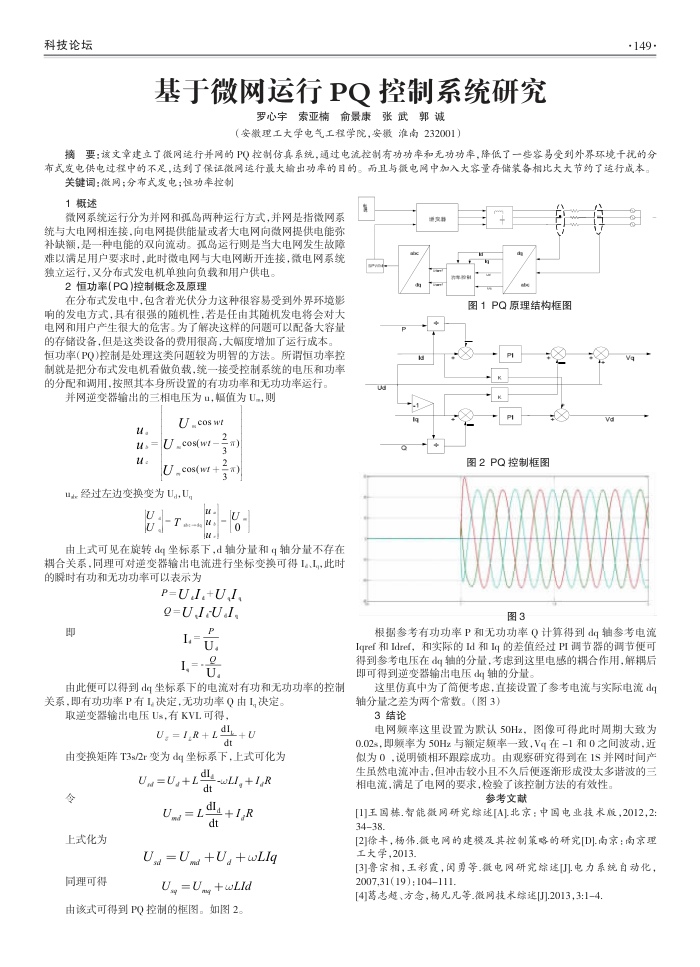
图3
根据参考有功功率P和无功功率Q计算得到dg轴参考电流 Iqref和Idref,和实际的Id和Ig的差值经过PI调节器的调节便可得到参考电压在d轴的分量,考虑到这里电感的榈合作用,解耦后即可得到逆变器输出电压d轴的分量。
这里仿真中为了简便考虑,直接设置了参考电流与实际电流d 轴分量之差为两个常数。(图3)
3结论
电网频率这里设置为默认50Hz,图像可得此时周期大致为 0.02s,即频率为50Hz与额定频率一致,Vg在-1和0之间波动,近似为0,说明锁相环跟踪成功。由观察研究得到在1S并网时间产生虽然电流冲击,但冲击较小且不久后便逐渐形成没太多谐波的三相电流,满足了电网的要求,检验了该控制方法的有效性。
参考文献
[1]王国株.智能微网研究综述[A]北京:中国电业技术航,2012,2: 3438.
[2]徐车,杨伟.微电网的建模及其控制策略的研究[D].南京:南京理工大学,2013
[3]鲁宗相,王彩霞,闪勇等.微电网研究综述[]电力系统自动化, 2007.31(19) : 104111.
[4]葛志越、方念,杨几凡等.微网技术综述].2013,3:1-4.