超高层建筑液压爬模体系模块化设计及工程应用
内容简介
 超高层建筑液压爬模体系模块化设计及工程应用
超高层建筑液压爬模体系模块化设计及工程应用高吉龙
上海建工集团股份有限公司上海
200080
摘要:随着超高层建筑的发展,液压爬模技术得到广泛应用,且在不断改进创新,主要体现在模块化、标准化、通用化。结合工程实践,从结构体系、围护体系、施工设施等方面,介绍了液压爬模的模块化设计,并对模块化的结构体系进行有限元分析,以检验结构及节点的安全可靠性
关键调:超高层建筑;液压爬模;模块化设计;工程应用
中图分类号:TU755.2
文献标志码:B
DOl: 10.14144/j.cnkijzsg.2016.07.034
ModularDesignandEngineeringApplicationofHydraulicClimbing
FormworkSystemtoSuperTallBuilding
GAO Jilong
d.Shanghai200080
Shanghai Construction Group Co., Ltd,
超高层建筑液压爬模现状和发展
我国的超高层建筑发展起始于1990年,直至2007年仍处于起步期,2008~2015年为超高层建筑的快速发展期。液压爬模作为超高层建筑结构施工的关键技术之一,在我国的发展大致分为3个阶段。
1)引进吸收阶段:20世纪90年代后,我国开始引进国外的爬模技术,并用于部分超高层建筑施工,如深圳地王商业大夏(69层,高325m)采用了瑞士VSL液压自动爬升模板工艺施工。
2)自主研发阶段:21世纪初,随着我国施工技术的进步,国外的爬模技术难以适应中国的国情,存在比如绑扎钢筋是在模板操作架内进行、围护栏杆采用木方且不设安全网等问题。因此,国内一些建筑企业相继研制出具有自主知识产权的液压自动爬升模板系统。
3)技术创新阶段:近些年,随着爬模应用日益广泛,新的需求不断出现,如对制作安装周期、体型适应性和周转使用率提出了更高的要求,爬模发展进入技术创新阶段,其中模块化设计是重要方向之一。
液压爬模结构组成及特点 2
2.1爬模结构组成
液压自动爬升模板体系是一个复杂的系统,包括:模板系统、操作平台系统、爬升机械系统、液压动力系统
基金项目:上海市国有资产监督管理委员会企业技术创新和能级提升项目(2014011)。
作者莆介:高吉龙(1984一),男,硕士,工程师。通信地址:上海市闵行区新骏环路700号(201114),收稿日期:2016-03-16
922
建筑施工・第38卷・第7期万方数据
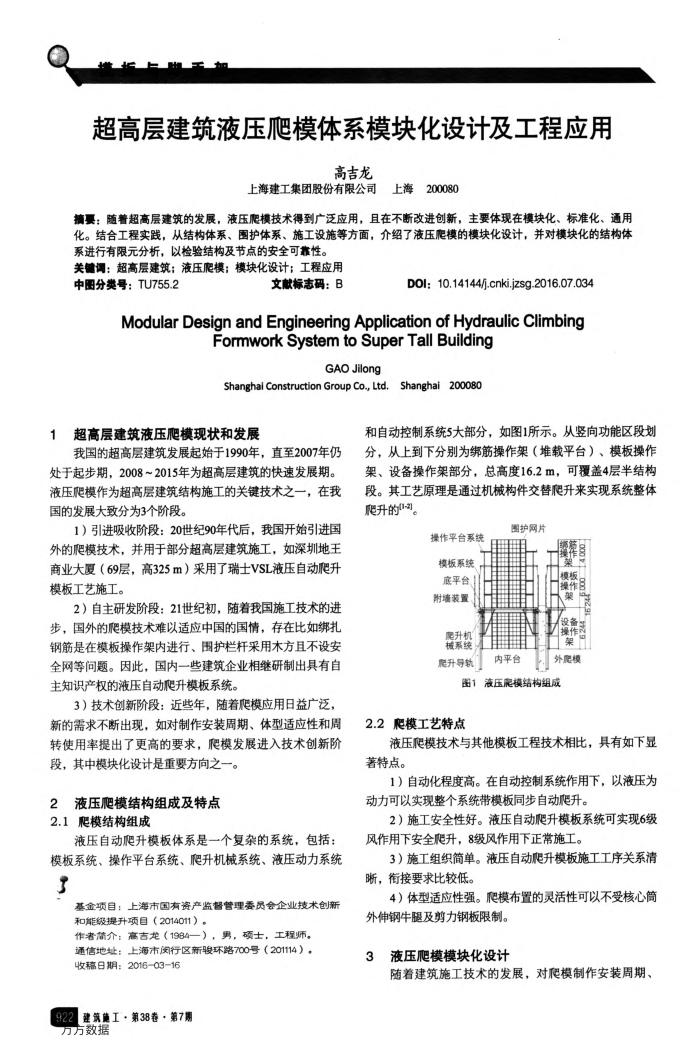
和自动控制系统5大部分,如图1所示。从竖向功能区段划分,从上到下分别为绑筋操作架(堆载平台)、模板操作架、设备操作架部分,总高度16.2m,可覆盖4层半结构段。其工艺原理是通过机械构件交替爬升来实现系统整体爬升的-]。
操作平台系统模板系统底平台、附墙装置
鹿升机械系统爬升导轨
图护网片内平台
魔模板操作目架
架外肥模
图1液压鹿模结构组成
2.2爬模工艺特点
液压爬模技术与其他模板工程技术相比,具有如下显著特点。
1)自动化程度高。在自动控制系统作用下,以液压为动力可以实现整个系统带模板同步自动爬升。
2)施工安全性好。液压自动爬升模板系统可实现6级风作用下安全爬升,8级风作用下正常施工,
3)施工组织简单。液压自动爬升模板施工工序关系清晰,衔接要求比较低。
4)体型适应性强。爬模布置的灵活性可以不受核心筒外伸钢牛腿及剪力钢板限制。
3
液压爬模模块化设计
随着建筑施工技术的发展,对爬模制作安装周期、