您当前的位置:首页>论文资料>水下滑翔机的控制系统设计及运动仿真
内容简介
 第42卷第2期 2013年04月
第42卷第2期 2013年04月船海工程
SHIP & OCEAN ENGINEERING
D0I:10. 3963/i. issn. 1671-7953. 2013, 02, 042
Vol.42No.2 Apr.2013
水下滑翔机的控制系统设计及运动仿真
李畔,吴琪
(哈尔滨工程大学船舶工程学院,哈尔滨150001)
摘要:在建立水下滑翔机的结构总布置草图的基础上,进行滑翔机的单片机控制系统设计;在Viscual C++软件里进行机翼布置位置调节对滑期机运动性能的影响分析,结果表明采用活塞进行滑翔机的织倾调节是可行的,进行机翼优化布置可以增加滑翔机的单程滑翔距离。
关键调:水下滑翔机:控制系统;单片机:ViscualC++
中图分类号:TP24
文献标志码:A
水下滑翔机是为了满足大尺度、长时间、大范围海洋环境监测需要,将浮标、潜标技术与水下机器人技术相结合,研制出的一种固定翼形、通过浮力驱动的水下无人运载器,它具有制造成本和维护费用低、可重复利用、投放回收方便、可大量布放、低阻力、低噪声和长续航能力等特点。因此作为一-种可长时间机动部署的水下运载平台或者监测平台,水下滑翔机已经越来越被海洋大国所重视"]。
水下滑翔机的运动原理和系统组成水下滑翔机通过改变重心相对浮心的位置,
实现姿态的调节和控制。根据需要,水下滑翔机有两种方式实现滑翔。第一种是通过吸人或排出外部液体,改变自身的重量,产生下沉或上浮的动力,同时相应改变载体重心在纵向上的位置,形成一定的攻角,再利用水平翼产生的升力的纵向分力,从而实现纵向滑翔;第二种是通过液压系统将液体从外皮囊内压入密封的滑翔机壳体内部或从密封的滑翔机壳体内部压入外皮囊内,改变自身的体积,使浮力发生变化,通过机翼产生下沉或上浮的动力,同时调节载体重心,实现纵向滑翔(2)。 1.1运动过程
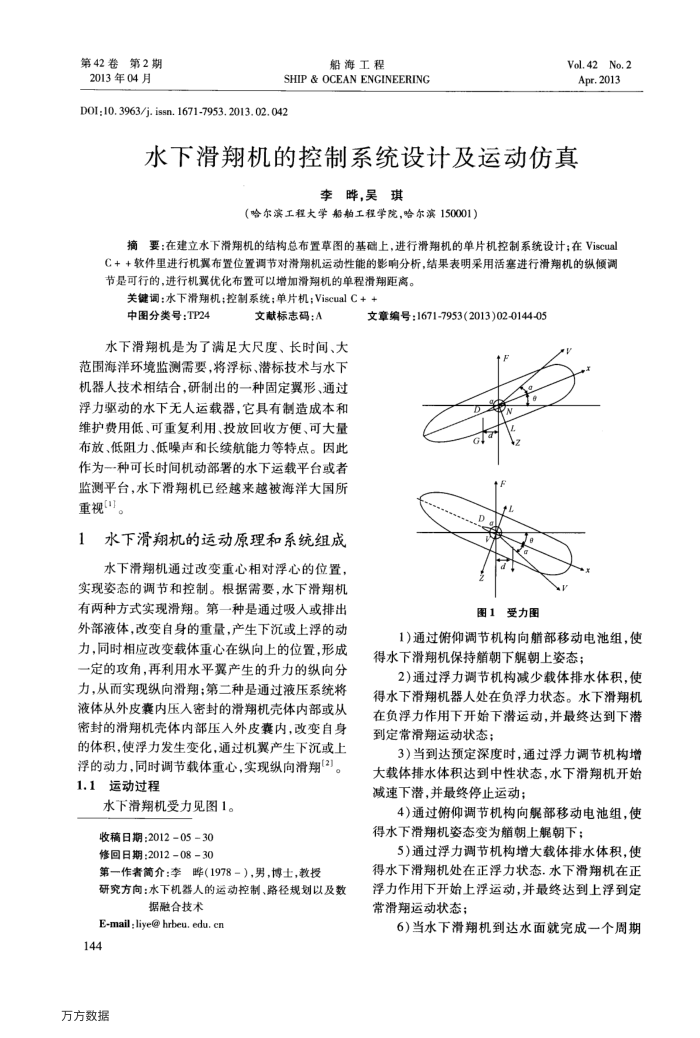
水下滑翔机受力见图1。
收稿日期:2012-05-30 修回日期:2012-08-30
第一作者简介:李哗(1978),男,博士,教授
研究方向:水下机器人的运动控制、路径规划以及数
据融合技术
E-mail liye@ hrbeu. edu. cn 144
万方数据
文章编号:1671-7953(2013)02-0144-05
图1受力图
1)通过俯仰调节机构向部移动电池组,使得水下滑期机保持朝下舰朝上姿态;
2)通过浮力调节机构减少载体排水体积,使得水下滑翔机器人处在负浮力状态。水下滑翔机在负浮力作用下开始下潜运动,并最终达到下潜到定常滑期运动状态;
3)当到达预定深度时,通过浮力调节机构增大载体排水体积达到中性状态,水下滑翔机开始减速下潜,并最终停止运动;
4)通过俯仰调节机构向舰部移动电池组,使得水下滑期机姿态变为崩朝上舰朝下;
5)通过浮力调节机构增大载体排水体积,使得水下滑翔机处在正浮力状态.水下滑翔机在正浮力作用下开始上浮运动,并最终达到上浮到定常滑期运动状态;
6)当水下滑翔机到达水面就完成一个周期
上一章:新上海-轮顶边舱改装工程
下一章:双向正交密加筋板的极限强度预报