����ǰ��λ�ã���ҳ>��������>�������и�Ļ��������߱��·���滮
�������и�Ļ��������߱��·���滮
���ݼ��
 ��33����2�� 2012��2��
��33����2�� 2012��2������ѧ��
TRANSACTIONSOFTHECHINAWELDINGINSTITUTION
Vol.33 February
�������и�Ļ��������߱��·���滮
�������ɼ���������ߺ���
����������ҵ��ѧ�Ƚ����������ӹ����ص�ʵ���ң�������150001��
ժҪ���촬��ҵ��Ҫ�õ��������֣����ʵ���ֵ��Զ��и��뻮�����⣬�Ի��������߱�̼����������о������������������ƵĻ��������߱��ϵͳ��ʵ�����и���Զ������ص�����и���������߱���е�·���滮���������о����������¿��и�������ģ��·��ƫ�ú�·�����㷨���ֱ�����˱�ֺͽǸ��и�ķ�����¿��и����顣����������и�·���滮�㷨�ܹ�������¿��и�����и�¿ڽ�
�ȵ�������С��1�㣬�и����ƽ�ȣ��ܹ�����ʵ�����и��Ҫ�ؼ��ʣ������ˣ����и���߱�̣��¿��и�
��ͼ����ţ�TG115.28���ױ�ʶ�룺A���±�ţ�0253-360X(2012)02-0001-04
0����
�촬��ҵ��Ҫ���д��������и���ߣ�Ŀǰ�������˹����߰��Զ��豸��ɣ�������Ա�����������ӣ�����Ч�ʵ͡���Ʒ�ߴ羫�����Ա�֤�����Ż����˼����ķ�չ�����û����˽����ֵ����Ի��и��Ѿ���Ϊ��չ���ơ������Ѿ�������ص��о��������촬��ҵ������ʵ�ʵ�Ӧ�ã������HGG �����и������ߣ��¹�ISU�Ļ��������иԪ��)
�ڻ��������и������У���������Ϊ�и��ִ�й��ߣ�Ҫ���CAD/CAMһ�廯�Զ��и�ܣ�����ļ��������߱�̣����и�ͼ��ת���ɻ������и�·��[2]�������Ϻ���ͨ��ѧ�Ƚ������ֻ������и����߱�̵��о������������߱��ϵͳ[3] ���������߱��ʵ�����и���Ҫ���������������������߱����Ҫ�ʺ��иҵ�ֳ���Ӧ�ã���ʵ�û����⣻����Ǿ��жԸ����¿ڵ��и�����������¿��и�ֹ���������и�.����ǰһ�����⣬һЩ��Ʒ���Ļ��������߱��������IGRIP�� ROBOCAD�����ڲ������Ӳ����ܹ��ܺõĽ����һ��������Ҫ�����и��·���滮�����о������и�������ģ�㷨����������߱�̶Ը���·�����¿ڵ��и��������и�ʱ�����ڲ�ͬ���¿���ʽ���и���ͶӰ�������������·�������Ա��ƻ���
��Ҫ����·���¿�ƫ�ú�˳��滮�㷨�ո����ڣ�2010-11-22
������Ŀ��������Ȼ��ѧ����������Ŀ��50905043��
������
���
No. 2 2012
���û������и�·���������Ժ������Ե��ص㣬
�����¿����͡��¿ڽǶȺ��¿ڸ߶ȣ�������¿��γɵ�ƫ���ߣ���ŷ���任���������R����������R������ƫ��R,�������Ƕȣ��Ӷ��õ��������и�·��[4)
���������и�ϵͳ 1
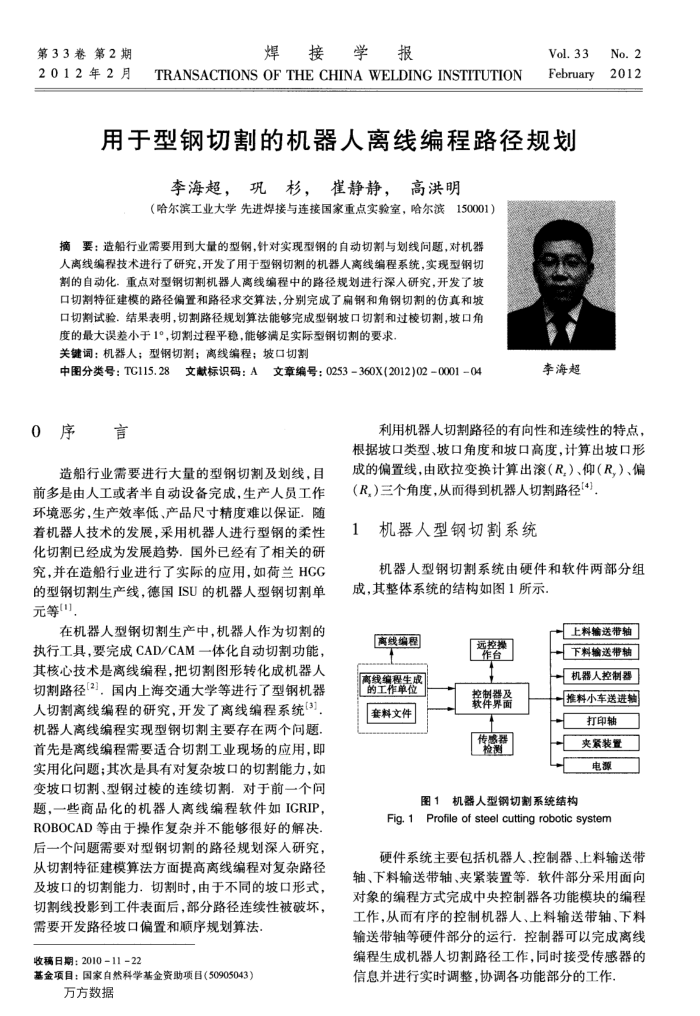
���������и�ϵͳ��Ӳ����������������ɣ�������ϵͳ�Ľṹ��ͼ1��ʾ��
���߱�� t
���߱�����ɵĹ�����λ
�����ļ�
Զ������̨��
���ʴ��������
�������ʹ����������ʹ�������˿���������С���ͽ���
��ӡ��з�װ�õ�Դ
ͼ1������������ϵͳ�ṹ
Fig. 1Profile of steel cutting robotic system
Ӳ��ϵͳ��Ҫ���������ˡ����������������ʹ��ᡢ�������ʹ��ᡢ�н�װ�õ�.�������ֲ����������ı�̷�ʽ������������������ģ��ļ̳̹������Ӷ�����Ŀ��ƻ����ˡ��������ʹ��ᡢ�������ʹ����Ӳ�����ֵ�����.����������������߱�����ɻ������и�·��������ͬʱ���ܴ���������Ϣ������ʵʱ������Э�������ܲ��ֵĹ���