您当前的位置:首页>论文资料>侧围总成焊装夹具设计与机器人焊接模拟
内容简介
 RoduclionTheme生产应用
RoduclionTheme生产应用月接
侧围总成焊装夹具设计与机器人焊接模拟
天津中德职业技术学院(300350)
孙学娟杨静武晋
摘要侧围总成是小客车车身的主要组成部分,焊接质量影响其使用性能,焊接自动化程度影响小客车的生行机器人焊接仿真模拟,不仅达到焊接快速高效、准确可靠的目的,而且满足汽车市场的快速发展以及人们对小客车的个性化需求。
关键词:汽车侧围总成焊装夹具焊接机器人模拟中图分类号:TG431
0前言
汽车焊装生产线一般由车身总成、下车体总成、左右侧围总成、顶盖总成、门盖总成等几个大总成组成,而大总成又可向下划分为几个小总成。
随着国内制造业向精密化、高效化、智能化方向发展,机器人的应用遍及各行各业,尤其在汽车行业。焊接机器人的使用,实现了汽车车身生产自动化、智能化,这不但降低工人的劳动强度,提高焊接质量,而且满足人们对汽车性能和个性化定制的需求。国外知名汽车制造厂大多是焊接车间无人化,这就对焊装夹具的精度及其周边机器人附属设备提出了非常严格的要求。因此在设计焊装夹具时,要考虑良好的操作性、夹紧定位的可靠性,夹具制造调整的方便性。调整时留有充分的空间,以保证各个夹紧件与支撑件在所需的方向上灵活可调,这是车身焊接夹具结构保证车身蒙皮焊接质量的关键"]。焊接夹具的设计主要分三个阶段:即产品结构分析阶段、夹具设计阶段、机器人模拟焊接阶段。首先拿到车身数模后先要对其结构层级、焊点位置进行分析,满足工艺要求后对其每个总成进行定位夹持点分析,并利用程序做出定位夹持点信息。夹持点确定后要依据上件总成及工位节拍来确定本工位可焊点数量,合理分布焊点,初选焊钳;然后根据定位夹持点信息进一步绘制夹具夹持单元,以此来确定本工位元件的定位稳定性;最后将依据绘制完成的夹持单元全部转化到相应的模拟软件CATIA中,利
收稿日期:20151126
基金项目:天津市高等学校科技发展基金计划项目(20140413);天津市
科技兴海计划项目(KJXH2013-14)。万方数据
用初选焊钳进行机器人模拟,模拟过程中若遇到干涉等情况需要及时调整夹具结构或焊钳局部结构,以保证焊接的可靠性。
焊接夹具结构的设计分析通常采用计算机辅助设计CAD的方法进行设计绘制,随后利用机器人在CAT IA环境下进行机器人模拟,从而保证汽车车身焊接质量和焊接精度的要求。汽车侧围总成焊装方案的分析就是通过计算机模拟的方法进行的,缩短了设计周期,
达到了很好的预期效果[2-3] 汽车侧围总成定位分析
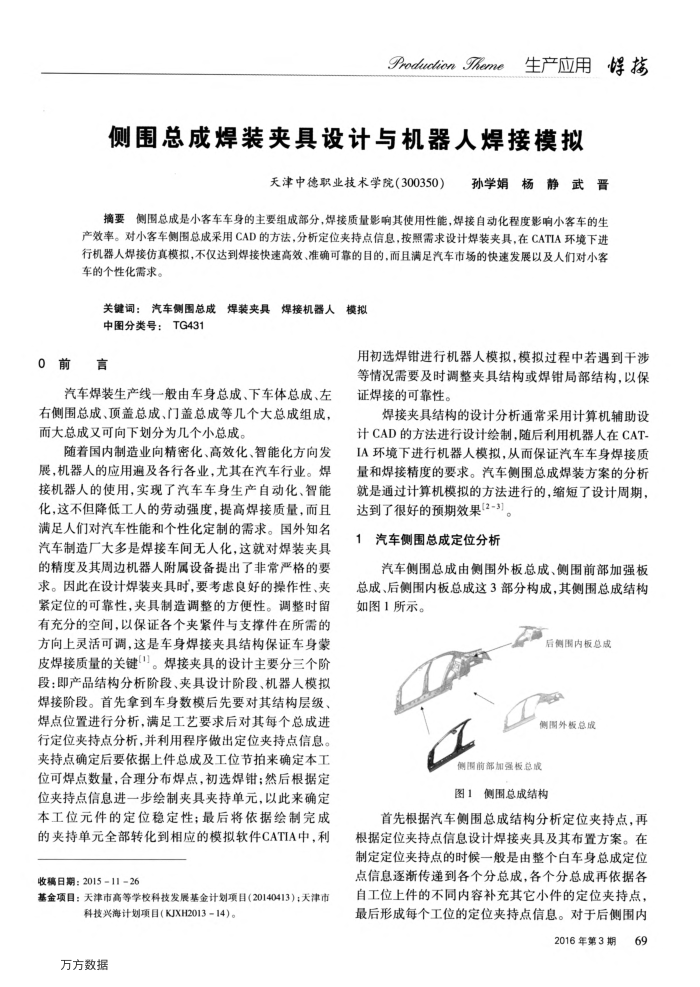
汽车侧围总成由侧围外板总成、侧围前部加强板总成、后侧围内板总成这3部分构成,其侧围总成结构如图1所示。
后侧围内板总成侧围外板总成
侧围前部加强板总成图1侧围总成结构
首先根据汽车侧围总成结构分析定位夹持点,再根据定位夹持点信息设计焊接夹具及其布置方案。在制定定位夹持点的时候一般是由整个白车身总成定位点信息逐渐传递到各个分总成,各个分总成再依据各自工位上件的不同内容补充其它小件的定位夹持点,最后形成每个工位的定位夹持点信息。对于后侧围内
2016年第3期69
上一章:全数字智能脉冲弧焊电源系统设计与实现
下一章:激光熔覆Fe-W合金涂层的组织及性能