����ǰ��λ�ã���ҳ>��������>����ʽ�����������������о�
����ʽ�����������������о�
���ݼ��
 ��е����ʦ
��е����ʦMECHANICAL ENGINEER
����ʽ�����������������о�
�����������ڹ�
���㽭�����ѧ��������繤��ѧԺ.�㽭��ɽ316022��
ժҪ�������������ѹ㷺Ӧ���ں���������̽��ˮ����Ⱦ����ƺ�ˮ3D��Ⱦͼ�ȷ���������Ҫ���á�����ͳ�ķ���������һ����õ綯��������Ϊ����Ҳ�м���Ͻ�����ʽ�ġ����������һ����������ʽ�ķ����㣬���Ǵ��������ζ��������Լ����������λ�����ü�ȡ��У�ͬʱ����Դ�ͳ��ƴ������������ױ����ֵ����⣬����˿���������Ϊ���ķ��������㡣ͨ��̼������������²����Ķ�����̼��Ϊ������������������������и������ܡ��÷����������������С������
���κ�αװ�ȹ��ܣ�������̫���ܺ�ˮ���ѹ�������Է��磬�Ӷ���С�������ܵ�����������������������ؼ��ʣ����������������㣻�����ܣ�����
��ͼ����ţ�S932.92 0����
���ױ�־�룺A
�����εĻ��������ڸ������й㷺�����ƣ������������ˮ�µ���ȾԴ����������״������������۲�ˮ�����������������Ⱥ��
���������㶼�Dz��õ綯�����������ģ���綯���������˵������ȽϿ��٣�������������������ױ����ᣬҲ�����ױ���Ⱥ���ܡ������о������һ����Ҫ������������������ǰ����ˮ�����η��������㡣�����ͷ��������㲻�����ֲ���ͳ�綯����ʽ(-��ȱ�ݣ��Ҿ���������������Ⱦ�����������ص㣬���ܸ��õ�Ӧ���ھ�����⡢����̽��������
1
��������ṹ
��������������м����ͷС��������渲����Ƭ
���ڱ������壻��Ƭ������һ���Һ����Ӿʱ�ɼ�Сˮ������������������һ�в��ߣ����ߺ�����������Ҫ��Ϊ�ⶨ�����֪ˮ�������ã�������峤��������������������β����������ˮ�е��˶����٣������Ĺ��������β�����������ȶ������ζ����任����͵������ٵ����ã�������ά������ֱ���ͷ�ֹ��б��ƽ�����٣������Ĺ�����Э������ά�������ƽ�⡢Э������������ת�����ã����������ζ����ܣ���Ҫ����������Ӿ������ת�����;�����⣬�������У���Ҫ�����ǵ�������ı��أ���������Эͬ�£�����ʹ��ͣ���ڲ�˾��ȵ�ˮ���
2���������� 2.1�������
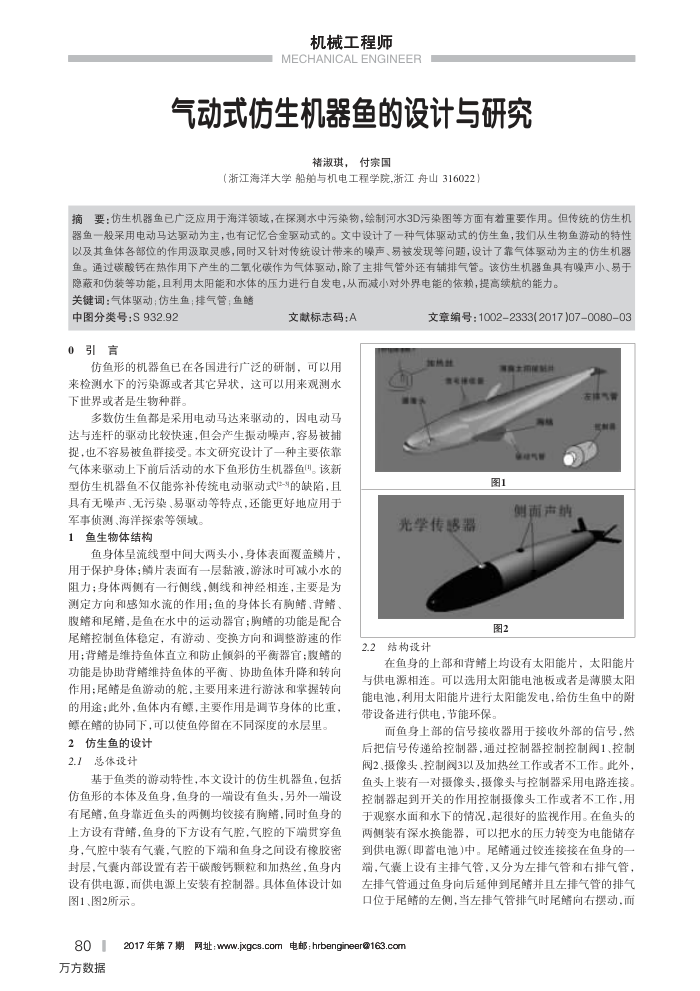
����������ζ����ԣ�������Ƶķ��������㣬���������εı��弰������������һ��������ͷ������һ������β��������������ͷ�����������������ͬʱ�������Ϸ����б������������·�������ǻ����ǻ���¶˹ᴩ��������ǻ��װ�����ң���ǻ���¶˺�����֮���������ܷ�㣬�����ڲ�����������̼��ƿ����ͼ���˿�����������й���Դ���湩��Դ�ϰ�װ�п��������������������ͼ1��ͼ2��ʾ��
80 ������
���±�ţ�1002-2333(2017)07-0080-03 ������
3������ʱƬ
���ŷ�
�ڳ���
��Խҽ������ͼ1
��������
��ѧ������
ͼ2
2.2�ṹ���
������
�ڽ������ϲ��ͱ����Ͼ�����̫����Ƭ��̫����Ƭ�빩��Դ����������ѡ��̫���ܵ�ذ�����DZ�Ĥ̫���ܵ�أ�����̫����Ƭ����̫���ܷ��磬���������еĸ����豸���й��磬���ܻ�����
�������ϲ����źŽ��������ڽ����ⲿ���źţ�Ȼ����źŴ��ݸ���������ͨ�����������ƿ��Ʒ�1�����Ʒ�2������ͷ�����Ʒ�3�Լ�����˿�������߲����������⣬��ͷ��װ��һ������ͷ������ͷ����������õ�·���ӡ����������ص����ÿ�������ͷ�������߲����������ڹ۲�ˮ���ˮ�µ��������ܺõļ������á�����ͷ������װ����ˮ������������ˮ��ѹ��ת��Ϊ���ܴ��浽����Դ��������)�С�β��ͨ�����ӽ��������Ķˣ������������������ܣ��ַ�Ϊ�������ܺ�����������������ͨ������������쵽β�������������ܵ�������λ��β������࣬��������������ʱβ�����Ұڶ�����
2017���7����ַ��www.jxgc8.com���ʣ�hrbengineer@163.com