您当前的位置:首页>论文资料>土方机械ROPS试验台控制系统的开发
内容简介
 试验・研究
试验・研究土方机械ROPS试验台控制系统的开发
黄志强,王一峰
(厦门市产品质量监督检验院国家场(厂)机动车辆质量监督检验中心)
摘要:从控制系统角度对土方机械ROPS试验台的总体架构及实现方式进行了介绍。在对现行的ROPS装置的检测标准及国内现有的测试设备进行分析对比的基础上,提出对土方机械ROPS 装置进行加载试验并对加载状态进行实时跟踪的方式及实现方法,在此基础上开发了全新的控制系统。通过控制系统可以实现对加载速度的调节,使加载作业过程与测试标准提出的静态加载要求相一致。面控制系统的闭环控制方式不仅可以实现对加载状态的实时控制还能实现对加载结束条件的自动判定,在试验符合加载结束条件时系统可以自动中止对试样进行加载。现场试验的结果表明,该系统的控制功能达到较好的效果。
关键词:ROPS;试验台;控制系统;开发
土方机械在行驶和作业时,经常会遇到一些由于驾驶转向速度过高、场地不平、斜坡、沟坑或地面松软塌陷、操作不当等引起的翻车事故,导致司机受到振动、撞击或因司机室变形而被压伤。
为了保护司机的安全,国内外的土方机械制造企业及管理部门在对土方机械的工作环境及其可能出现的意外进行充分分析的基础上提出了相应的防护要求。其中,土方机械翻车保护结构(Roll-over ProtectiveStructure,简称ROPS)即为其重要的防护结构之一。为了对该防护结构进行进一步的规范,国内外出台了相应的标准对其进行约束,主要有:a)ISO 3471土方机械翻车保护结构实验室试验和性能要求;b)GB/T17922―1999土方机械翻车保护结构实验室试验和性能要求。
虽然在ROPS的试验要求上有了较为详尽的规定,国内也有多家院所具备了ROPS的检测资质,但是在ROPS测试设备的开发方面目前还只是处于探索阶段。目前多数的测试设备都是一种简易的测试系统,在对ROPS装置进行测试过程中需通过变换 ROPS装置的安装方位来实现不同方向的加载试验,从测试的原理来讲与现行的标准并无差异,但是在加载的实现方面却并不完全相符。为此,本文在对国内外的标准进行充分分析的基础上提出了该防护装
置的测试设备的总体构想,并在此基础上进行进步的细化,开发出能够充分满足测试需要的设备。本文将从测试设备的控制系统的总体架构及其实现方
法上对该测试设备进行描述。 1控制系统开发
1.1控制系统的总体结构
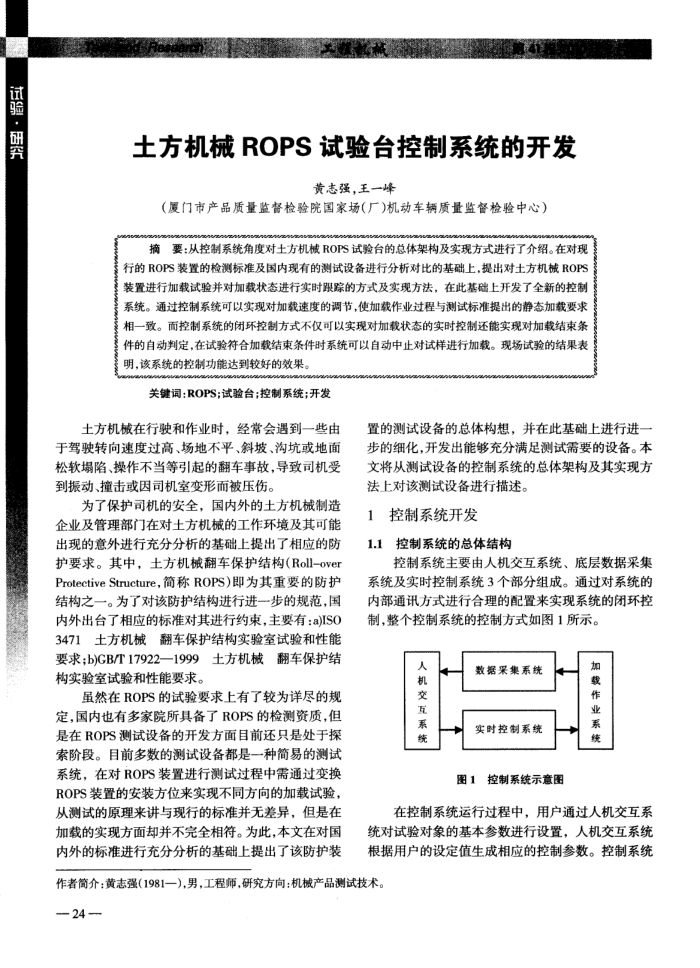
控制系统主要由人机交互系统、底层数据采集系统及实时控制系统3个部分组成。通过对系统的内部通讯方式进行合理的配置来实现系统的闭环控制,整个控制系统的控制方式如图1所示。
人机交互系统
数据采集系统实时控制系统
图1控制系统示意图
加载作业系统
在控制系统运行过程中,用户通过人机交互系
统对试验对象的基本参数进行设置,人机交互系统根据用户的设定值生成相应的控制参数。控制系统
作者简介:黄志强(1981一),男,工程师,研究方向:机械产品测试技术。―24
上一章:关于起重机绝缘电阻检测方法探讨
下一章:叉车门架上横梁下料成形工艺的优化设计
相关文章
GB/T 19930.2-2014 土方机械 挖掘机保护结构的实验室试验和性能要求 第2部分:6t以上挖掘机的滚翻保护结构(ROPS)
GB/T 19930.2-2014 土方机械挖掘机保护结构的实验室试验和性能要求第2部分∶6 t 以上挖掘机的滚翻保护结构(ROPS)
GB/T 19929-2014 土方机械 履带式机器制动系统的性能要求和试验方法
GB/T 25609-2010 土方机械 步行操纵式机器的制动系统 性能要求和试验方法
GB/T 34353-2017 土方机械应用电子器件的机器控制系统(MCS) 功能性安全的性能准则和试验
GB/T 34353-2017 土方机械 应用电子器件的机器控制系统(MCS) 功能性安全的性能准则和试验
GB/T 19933.5-2014 土方机械 司机室环境第5部分∶风窗玻璃除霜系统的试验方法
GB/T 19933.5-2014 土方机械 司机室环境 第5部分:风窗玻璃除霜系统的试验方法