您当前的位置:首页>论文资料>基于FPGA的步进电机发射机控制系统设计
内容简介
 敬事热车与率用
敬事热车与率用数控技术
基于FPGA的步进电机发射机控制系统设计
杨菁1.2
(1.中国传媒大学理工学部北京100024;2.国家新闻出版广电总局731台福建龙岩364000)
摘要:本文提出一种采用FPGA对步透电机速度与位置控制的方法,建立一种步进电机驱动控制系统该系统采用脉冲频率实现步造电机速度控制,可防止失步和过冲,提高工作效率,并结含实际工作控制,结果表明该方法的可衍性。
关键调:短波发射机FPGA控制模块步进电机步进驱动器光电控制
中图分类号:TP273
文献标识码:A
文章编号:1007-9416(2014)06-0007-02
直流电机是一种将电能转换成机械位移的机构,是发射机的原机设计,但直流伺服电机及减速机构存在较大的误差,原有的机械减速装置不够精确,误差放大器在电路中由于机房的干扰原因会出现数值不对,容易过调,难以抓到所要求的位置。在FPGA步进电机控制系统中,第一,采用每转1000个脉冲(0.360/单脉冲)的光电码盘取代原有的跟踪电位器,用在电机控制板内的数字计数取代原有的 8bit的A/D变换器,将极大提高计算精度,第二,采用谱波减速器来取代原有的机械减速装置,可以很大程度地保护传动装置之间的连接销钉,第三,取消原有的误差放大器,将可调元件的实际位置采用光电码盘的计数测量与要求的预置值进行数字运算比较,其误差将在数字上等于零,第四,取消何服放大器,调整小盒的输出直接控制
电机驱动电路驱动步进电机的转动。 1步进电机控制系统结构
1.1系统就速
整个步进电机控制系统结合发射机的自身运行特点,以FPGA 为步进核心,外连信息采集、频率调度、报警保护等控制模块,在发射机运行过程当中,由FPGA综合外来信号条件,输送出各路电机脉冲信号到步进电机驱动器,再到步进电机,进行实时的检测,从而确保各调谐器件转动位置的精确性,具有很好的多路通信能力,快速运算能力和抗干扰能力。
1.2系统结构
步进电机控制系统结构,包括以下4个部分:
FPGA主控模块,这里集中了短波发射机各个采集点所汇的信息,该部分涉及了短波发射机的开、关机,例频,各路电机位置驱动,各个调点的租细调,各种过荷保护。其整体工作就是接收到命令后对发射机进行倒频.调谐,即8路步进脉冲和方向电平输出控制。
步进驱动控制器,FPGA输出步进脉冲信号到步进驱动器,每接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从面达到调速的目的。
光电码盘,通过光电码盘跟随电机齿轮取样,逻辑对发送过来的电机预置位置和实际位置进行比较实,若预置位置大于实际位置,则送出正转信号,反之送出反转信号。
D>A转换模块,控制步进电机时需要对输出给绕组的脉冲进行分配。根据统一时钟,输出地址对ROM进行扫描,从ROM输出被扫描地址中存放的细分代码。细分代码为一定位宽的数字信号,经 D>A电路转换成相应的模拟量并进行功率放大,以驱动步进电机。 2FPGA控制能力实现
FPGA功能控制主要包括粗调控制、细调控制、自动手动控制,具体包括:租调控制,当发射机进行播音时,先要将各路电机调谱到预置位置,以快速运转到指定位置,细调控制,主要控制1.3.5路电容,细分值取决于各路驱动器的设置,也可以进行手动细分操作,自动手动控制,除了自动调谱外,当要求手动时:由A9发出FREE信号,使其信号置低,使电机脱机进行手动,手动信号通过DIR来控制电机的正转反转。手动完成后,再将FREE信号置高,以继续自动控制,与ARM通信功能,ARM可以通过SPI接口对FPGA内部的青存器进行配置和读取;步进电机正反转,实现对步进电机的正反向控制,限位控制功能,在步进电机上还设有上下限位,分别为光限位和机概限位。光限位在机械限位之前,通过对发光二极管的光挡,达到控制电机的停转。如果失效,后面还有机械限位来控制电机的停转,以达到双重保护的作用,这样电机就不会过调而损坏到元件。
2.1粗调控制设计
由FPGA控制套箱A9的主芯片向各路电机发出租调信号。在 EPROM中存储有发射机在不同工作频率下多路调谱元件所对应的最佳位置信息,从中取出要调频率所对应的每一个调谱元件的位置信息送给FPGA主芯片SPT-200将各路预置位置信息转化为脉冲数字信号传送到步进电机上,同时从A/D转换器中读回各调谐元件当前所处的位置信息,将二者位置信息进行比较,由判断逻辑按其差值的大小和极性来控制步进电机的转速和方向,直至二者的差值为零,即达到所调频率的位置,并将输人端切换到鉴相器3A4,接通高频,准备细调。
2.2细调控制设计
整机的工作细调过程如下:
前级调谱:细调一路,进人前级细调操作,禁止高末级细调。将前级栅压转换至正常值,前级步进电机动器接受来自A9的信号,而A9实时接受来自1路前级鉴相器3A4的误差信号开始细调。当误差为正时,电机顺转,数值下降,当误差为负时,电机反转,数值上
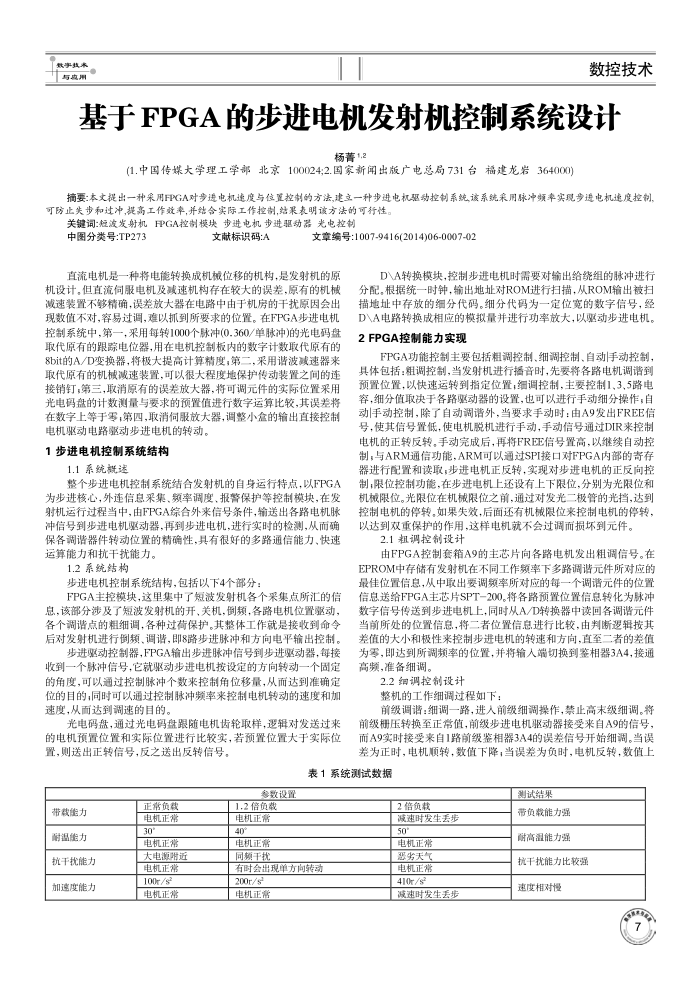
表1系统测试数据
参数设置 1.2借负费
带教能力耐温能力抗干扰能力加速度能力
正常负款
电机正常 30°
电机正常大电潮附通电机正常 100r/s 电机市带
电机正带 40
电机正带回额干扰
有时会出现单方向转动
200r/s 电机正带
2倍负载
减建时发生丢步 50°
电机正常恶劣天气电机正常 410元/s
减建时发生丢步
测试结果
带负载能力强耐高温能力强
抗干扰能力比较强速度相对慢