您当前的位置:首页>论文资料>采用变步长NLMS算法的回声消除系统
内容简介
 算法分析
算法分析采用变步长NLMS算法的回声消除系统
谢鹏
(上海飞机设计研究院上海200436)
电用
要:本文提出了一种来用变步长NLMS算法的自适应回声消除承航,系统表现出了良好的性能,不但结构简单,计算量也小。模报双摘
端通信实验表明该自速应滤波器工作正常,回声消除性能好,果用基予信号调相关性的双端检测方法也大大提高了减少了四声消除不干净的状况。
关键调:自造应滤液器回声消除步长控制中图分类号:TP911.72
文献标识码A
文章编号:1007-9416(2011)09-0122-02
回声消除技术主要用于消除在声音的播放和采集系统中产生的影响话音质量的电路回声和声学回声,电路回声是由于在固定电话系统中的2一4线转换过程中,由于阻抗不匹配面泄露产生的声音,由于电路回声延时比较固定,已经有了比较成熟的解决方案。而声学回声是由于扬声器和麦克风之间产生了声耦合,扬声器播放出来的声音被麦克风拾取后发回远端,这就使得远端谈话者能听到自已的声音。随着消回声消除技术的发展,当前回声消除研究的重点,已由电路回声的消除,转向了声学回声。在这篇文章中,主要解决的
是声学回声消除的间题。 1、系统组成及原理
图(1)表示了一个典型的自适应滤波回声消除系统。其中x(n) 是远端语音信号,u(n)为近端语音信号,(n)为麦克风采集到的语音信号,s(n)为传往远端的语音信号或残差语音信号,h(n)是回声信道的脉冲响应,W(n)是自适应滤波器的抽头系数,它被用来建模回声信道。如果建模得比较精确的话,w(n)和(n)将会匹配得比较好,则从麦克风采集进来的回声将会得到完美的消除。
x(n)
w(n)
s(n)
图(1)
AC
DTD
Echo path
h(n)
y(n)
u(n)
一个典型的自适应回声消除系统
w(n)的系数使用自适应算法进行实时更新,用于跟踪房间脉
冲响应。本文主要采用NLMS算法对滤波器的参数进行更新。
最小均方算法NLMS是自适应滤波算法的最初也是最根本的形式。
自适应FIR滤波器的输入x(n)和输出v(n)之间的关系表示如
下:
y (n) = x(n)*w(n)
即表示输人与冲激响应的卷积,展开后为:
y(n)
w()x(n-i)
(1)(2)
我们以w(n)作为第n次选代后得到的第/阶滤波器系数,那么
W
下一时刻的滤波器输出为;少(n))
>,w(n)x(n-i)
输出估计和实际输出的差值为:e(n)=(n)一y(n) 22
劳方数据
(3)(4)
LMS算法基本思想就是最小化估计误差的平方值e(n)。根据梯度下降算法,梯度的估计值可以决定最小值的方向。将目标函数 e(n)对FIR滤波器系数求导,可以得到梯度为:
= d(e(n)=-2e(n)x(n-)
(5)
dw(n)
根据梯度下降法,梯度估计的反方向就是目标函数下降的方向。所以权值选代的表达式如下:
w,(n+1) = w,(n) μ(n)V = w,(n)+ 2μ(n)e(n)x(n-i) 其中,(n)表示选代步长,如下:
μ(n) = μ /(x (n)x(n)
(6)(7)
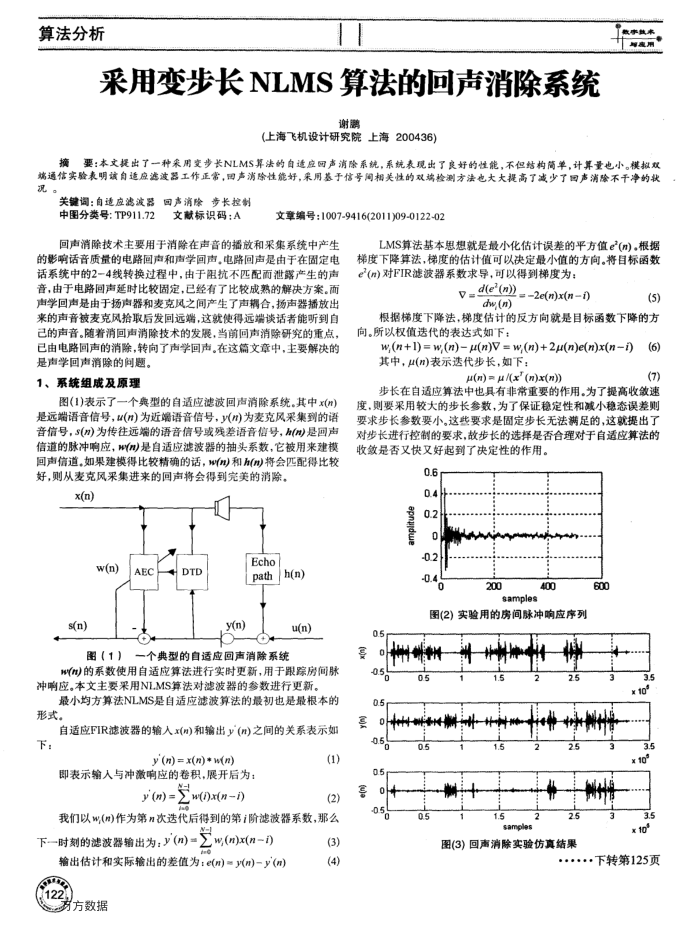
步长在自适应算法中也具有非常重要的作用。为了提高收速度,则要采用较大的步长参数,为了保证稳定性和减小稳态误差则要求步长参数要小。这些要求是固定步长无法满足的,这就提出了对步长进行控制的要求,故步长的选择是否合理对于自适应算法的收敏是否又快又好起到了决定性的作用。
0.6 0.4
d 0.6
0.2 0-0.2-0.4
0
200
samples
400
图(2)实验用的房间脉冲响应序列
五业车
-0.5 0.5% 0.5 nL 05%
0.5 0.5 0.5
Vhl
1.5 1.6
2
1.5
samples
2.5
600
3
hl
2.5 2.5
图(3)回声消除实验仿真结果
3.5 x tot 3.5 10°
3.5 x to*
...下转第125页
上一章:报警防盗系统的设计
下一章:边界扫描突出优势解析