您当前的位置:首页>论文资料>靶场测量中双基地雷达定位与定位精度分析
内容简介
 数事载本与率用
数事载本与率用学术论坛
靶场测量中双基地雷达定位与定位精度分析
马艳霞刘二小
(中电科技集团公司第三十八研究所安微合肥230088)
摘要:在靶场测量中远程预警相控阵雷达具备导弹全程覆盖与连续跟踪的优势,但其测量精度较差,通过为其配备接收站组成双基地雷达系统可提高测量精度。本文主要介绍T/R-R靶场双基地雷达系统对探测日标定位及定位精度模型,并进行仿真分析,结累表明这种双基地模型可改善定位精度
关键词:双多基地雷达系统日标定住定住精度分析
中图分类号:TN958 1引言
文献标识码:A
远程预警相控阵雷达在靶场测量中可实现试验导弹全射程覆盖与连续跟踪,具有大空域覆盖、二维相扫等优势,但其研制经费高。其相比靶场其他红外、光电等设备测量精度要差得多。为充分发挥远程相控阵雷达优势,可通过为其增加接收站的方式来提高其测量精度,其研制成本低,无源工作模式,对环境要求低,无污染。对于靶场测量任务而言,增加接收站组成双多基地雷达系统还具备抗综合电子干扰、反隐身等突出优点,研制效费比高。本文内容包括靶场
双基地雷达目标定位模型、目标定位精度仿真分析及结论。 2目标距离定位与定位精度模型分析
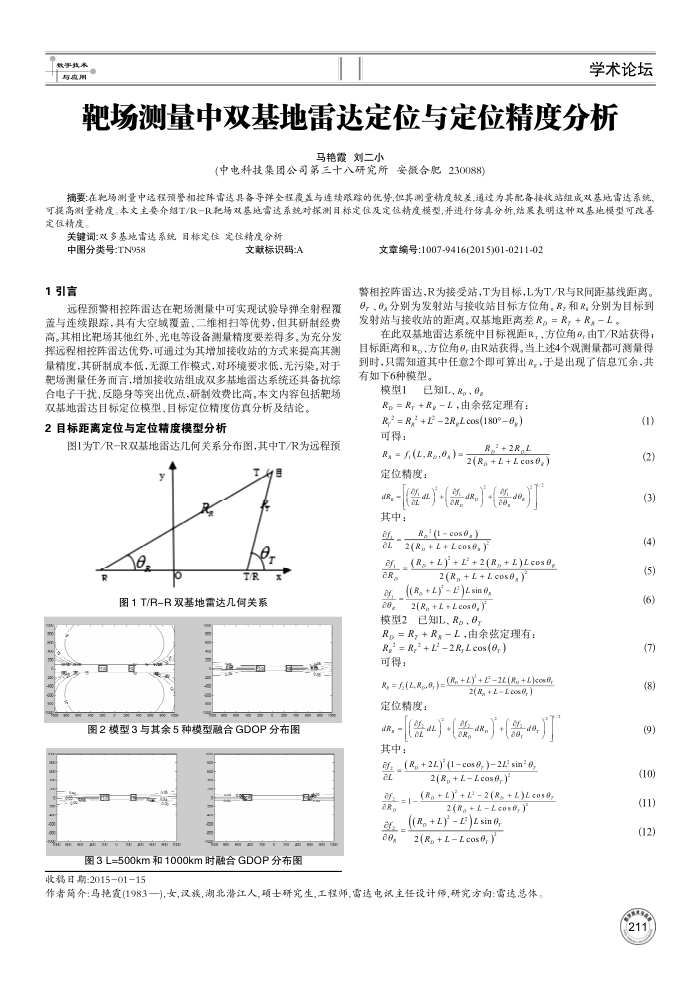
图1为T/R-R双基地雷达几何关系分布图,其中T/R为远程预
4 y
0
T4E T/R
图1T/R-R双基地雷达几何关系
EIPR
图2模型3与其余5种模型融合GDOP分布图
安
B
自自
图3L=500km和1000km时融合GDOP分布图
收稿日期:20150115
文章编号:1007-9416(2015)01-0211-02
警相控阵雷达,R为接受站,T为目标,L为T/R与R间距基线距离, 9,、6.分别为发射站与接收站目标方位角。R,和R,分别为目标到发射站与接收站的距离。双基地距离差R。=R,+R。-L
在此双基地雷达系统中目标视距R.、方位角8,由T/R站获得;目标距离和R。、方位角9.由R站获得。当上述4个观测量都可测量得到时,只需知道其中任意2个即可算出R。,于是出现了信息允余,共有如下6种模型。
已知L.R,e
模型1
R。=R,+R-L,由余弦定理有:
R,* = R, +L 2R, Lcos(180°0,) 可得:
R = f, (L, R,,o,)=
定位精度:
R。+2R,L
(gs02 7+ 7+ “)z
[【】+
aR, 其中: af
+28
R" (1 cos6,)
(*g5037 +7 +"g)z BL
F - (R + L) + L + 2(R, + L)L0% 0,
("0s02 7+ 7 + *r)z
ar。
S_ (R, + L) )L sin e, 26, 2(R, + L. + L cos 0, ) 模型2已知L、R。、6,
R。=R,+R,-L,由余弦定理有:
R," = R,* + L3 2R, L cos (0, ) 可得:
R,=(L,Rg.8,)-(R+L)+-2(R,+Lko8)
2(R, + L L cos , )
定位精度:
dR,
【】()
FL88
oL
其中:
± (R, +22) (1eos8,)2F’ sin*8,
aL
2(R, + L L cos ,)*
=1-(R + L) + -2(R +L)Le088, aR
2 (R + L L cosf, )
a a6
((R, + L)* )L sin 0, 2(R, + L Lcos, )
作者篇介:马艳霞(1983一),女,汉族,湖北潜江人,颈士研究生,工程师,雷达电试主任设计师,研究方向:雷达总体。
(1)(2)(3)(4)(3)(6)
(7)(8)(9)(10)(11)(12)
214