您当前的位置:首页>论文资料>基于多传感器融合的机器人导航系统避障研究
内容简介
 数执车与率用
数执车与率用应用研究
基于多传感器融合的机器人导航系统避障研究,
黄锦添
(广东南方职业学院广东江门529000)
关机器人的智能性的研究已经成为了机器人研究额域的热点。在其中机器人导航系统避障技术是研究机器人智能化的一个重要的方面,已经成为自动化领或的一个重点方向,本文研究了一种基于多传感器融合的机器人导航系统。
关键词:移动机器人障碍物检测避障
中图分类号:TP242
文献标识码:A
文章编号:1007-9416(2016)01-0073-01
移动机器人导航避障系统的研究是机器人领域的一个主要的分支,涉及到控制、机械、计算机等多门学科,成为了当前该领域的研究的热点间题。机器人技术代表了高新技术的发展前言,代表了国家当前技术的发展的水平,其中的机器人的避障技术是移动机器人导航避障系统智能性的关键的因素,是评价机器人智能化水平的关键的指标之一。本文就是在机器人自主导航系统的基础上,进行
导航过程当中的障碍物检测和局部路径规划的问题的研究。 1移动机器人的障碍物检测和规避算法的研究
1.1传感器障碍物检测原理
目前应用在机器人的外部环境感知的传感器有激光、雷达、红外超声等,根据信息的来源我们可以把环境的感知分为主动以及被动两种,主动传感器是通过发射测量的信号然后再接收外界环境反射的信号的传感器,比如红外、声纳、激光等,被动传感器是通过感受物体自身发出的光线或者物体对光线的反射而得到环境图像信息。目前市面上还没有一种传感器能够应用在各个领域当中,基于立体视觉障碍物的检测一直是该领域的研究的热点,但是对于多个摄像头的图像的匹配的间题一直都没有准确完整的解决的方案。本文以单目视觉为障碍物检测以及距离感知的传感器和超声波测距传感器相结合,融合了两类传感器的信息实现障碍物的定位检
人们通过视觉系统获取的信息约占获取的信息总量的75%,将模式识别以及图像处理的知识运用到机器人领域当中,并且模拟人脑处理信息的过程从图像当中提取有用的知识,本文将信息论当中的信息摘知识应用到图像处理的领域当中,通过统计视觉范围内的信息值来解析图像,从而能够检测障碍物,并用距离图像知识检测的结果进行二维图像和三维图像之间的转换,最终确定障碍物的坐标的位置,
1.2基于多传感器融合的障碍物检测定位
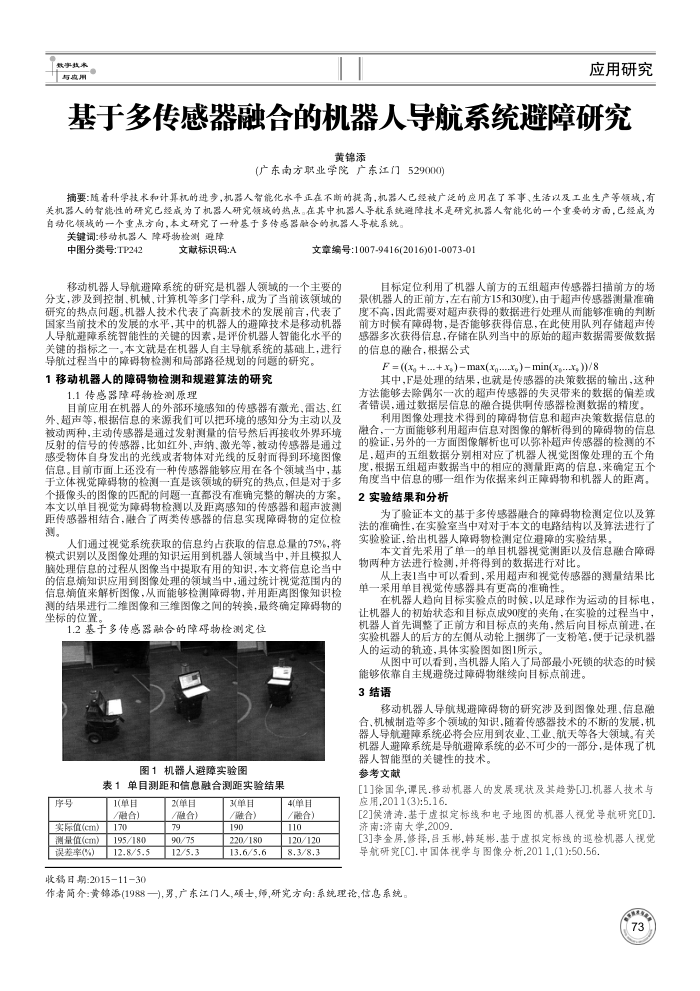
图1机器人避障实验图
表1单目测距和信息融合测距实验结果
序号
实际值(cm) 测量值(cm) 误差率(%)
自事) 融合) 170 195/180 12.8/5.5
目夷/融合) 79 90/75 12/5.3
3(单目/融合) 190 220/180 13.6/5.6
自更/融合) 110 120/120 8.3/8.3
目标定位利用了机器人前方的五组超声传感器扫描前方的场录(机器人的正前方,左右前方15和30度),由于超声传感器测量准确度不高,因此需要对超声获得的数据进行处理从而能够准确的判断前方时候有障碍物,是否能够获得信息,在此使用队列存储超声传感器多次获得信息,存储在队列当中的原始的超声数据需要做数据的信息的融合,根据公式
F = (X, +... x,)max(X...X,)min(X...X, )/8
其中,F是处理的结果,也就是传感器的决策数据的输出,这种方法能够去除偶尔一次的超声传感器的失灵带来的数据的偏差或者错误,通过数据层信息的融合提供响传感器检测数据的精度
利用图像处理技术得到的障碍物信息和超声决策数据信息的融合,一方面能够利用超声信息对图像的解析得到的障碍物的信息的验证,另外的一方面图像解析也可以弥补超声传感器的检测的不足,超声的五组数据分别相对应了机器人视觉图像处理的五个角度,根据五组超声数据当中的相应的测量距离的信息,来确定五个角度当中信息的哪一组作为依据来纠正障碍物和机器人的距离,
2实验结果和分析
为了验证本文的基于多传感器融合的障碍物检测定位以及算法的准确性,在实验室当中对对于本文的电路结构以及算法进行了实验验证,给出机器人障碍物检测定位避障的实验结果。
本文首先采用了单一的单目机器视觉测距以及信息融合障碍物两种方法进行检测,并将得到的数据进行对比。
从上表1当中可以看到,采用超声和视觉传感器的测量结果比单一采用单目视觉传感器具有更高的准确性。
在机器人趋向目标实验点的时候,以足球作为运动的目标电,让机器人的初始状态和目标点成90度的夹角,在实验的过程当中,机器人首先调整了正前方和目标点的夹角,然后向目标点前进,在实验机器人的后方的左侧从动轮上捆绑了一支粉笔,便于记录机器人的运动的轨迹,其体实验图如图1所示。
从图中可以看到,当机器人陷入了局部最小死锁的状态的时候
能够依靠自主规避绕过障碍物继续向目标点前进, 3结语
移动机器人导航规避障碍物的研究涉及到图像处理、信息融合,机械制造等多个领域的知识,随着传感器技术的不断的发展,机器人导航避障系统必将会应用到农业、工业、航天等各大领域。有关机器人避障系统是导航避障系统的必不可少的一部分,是体现了机
器人智能型的关键性的技术。参考文献
[1]徐国华,谭民.移动机器人的发展现状及其趋势[J].机器人技术与应用,2011(3):5.16
[2]侯清涛.基于虚报定标线和电子地图的机器人视觉导航研究[D] 济南:济南大学.2009.
[3]李金屏,修择,昌玉彬.韩延彬.基于虚报定标线的返检机器人视觉导航研究[C].中国体视学与图像分析,2011.(1):50.56
收移日期:2015-11-30
作者简介:黄锦添(1988一),男,广东江门人,硕士,师,研究方向:系统理论,信息系统,
上一章:航测内业中遥感影像融合方法研究
下一章:北斗卫星导航技术在公安系统中的应用