����ǰ��λ�ã���ҳ>��������>���Զ�����������Ѳ�߷�����
���Զ�����������Ѳ�߷�����
���ݼ��
 ��ƿ���
��ƿ������Զ�����������Ѳ�߷�����
Ī������
(�㶫ʯ�ͻ���ѧԺ�㶫ï��525000)
������������
ժҪ����Ծ������������������,�����һ�ֻ���������������ܷ��з������Ʒ���������������ATMEL��˾������ATmega1280AVRоƬΪ������ƽ̨��ϵͳ��ͨ�ż����ݴ������WIFI/4G����ͨ�ţ����ö�д��android��λ����������ͷ�������ղ���ͼƬ�ش�����λ������ͼ��ͨ��ͼ��ʶ���㷨����ͼƬ��������������Զ�������
�ؼ��ʣ����������ͼ��ʶ��AVRAndraid����ͨ��
��ͼ����ţ�TP29
1��Ŀʵʩ��Ŀ�ġ�����
���ױ�ʶ��:A
���±�ţ�1007-9416(2016)01-0152-01
�����ġ����ȹ�������ȫ������й㷺��Ӧ��ǰ�����ƹ��ֵ��
��ͳ��ϵͳ��ȫ�ż칤����Ҫ��ͨ��������Ա���еĶ���Ѳ�飺���Ų�ص������Ų���ù̶�����ͷ��ͨ����������ʵʱ������������Ѳ�����������Ѳ�鷽ʽ�����Ų��ʱ��Ѳ�鷽ʽ�����Ⱦ����ԡ�����Ѳ��ϵͳ��һ�ּල���ߡ��ż���̵�װ�ã������������������и�ҵ��Ѳ�ߡ�Ѳ�칤�������ӣ�����Ѳ���г�Ҳ�ڲ�����չ��Ϊ�˷�ֹ���⡢ȷ����ȫ���ִ��������ೡ�϶���Ҫ��һ����������ܶ���ʼ�ļ졣���ڴˣ�����Ŀ�����һ�ֻ���������������ܷ���Ѳ�����Ʒ�����
�÷������������������Ϊ���������ˣ���һ�ֽṹ��ӱ�����Խ���������˷����������������ĸ�������Ϊ�������������п��з��У������гߴ��С�������ᡢ�ʺ�Я���ص㣬�ܹ�Я��һ���������غɣ��߱����˼�ʻ������������������ͨ�� WIFL/4G�ƶ���������ͨ�Ż����ԶԷ���������Զ�̿��ơ��Զ�������Ѳ�߷�����ͨ��������������ض��������У�ʵʱ���������������Ÿ��ż칤���е���Ϣ�Զ�ȷ��¼���������ͻ���¼�����ʵ�ʣ�ʵ�ֹ�������ͻ���¼���Ԥ�����Ų飬�����ֹ��������������Դ���˷ѣ����ij��֣�ʹ�����ߡ��ż����ʵ�������˻��Զ���������ֶ�ʵ�����ܻ������绯������ѧУ����������վ����
ͼ�����������
����
����
��̬���� A2213/13T-1000KV��ģר�õ��
�ո����ڣ�2015-11-03
4G����ͨѶ
����
�ɿص��ӵ�����
ͼ1ϵͳ�ṹͼ
GPS��λ
2��Ŀʵʩ����
2.1ϵͳ˵�����ṹ��ͼ
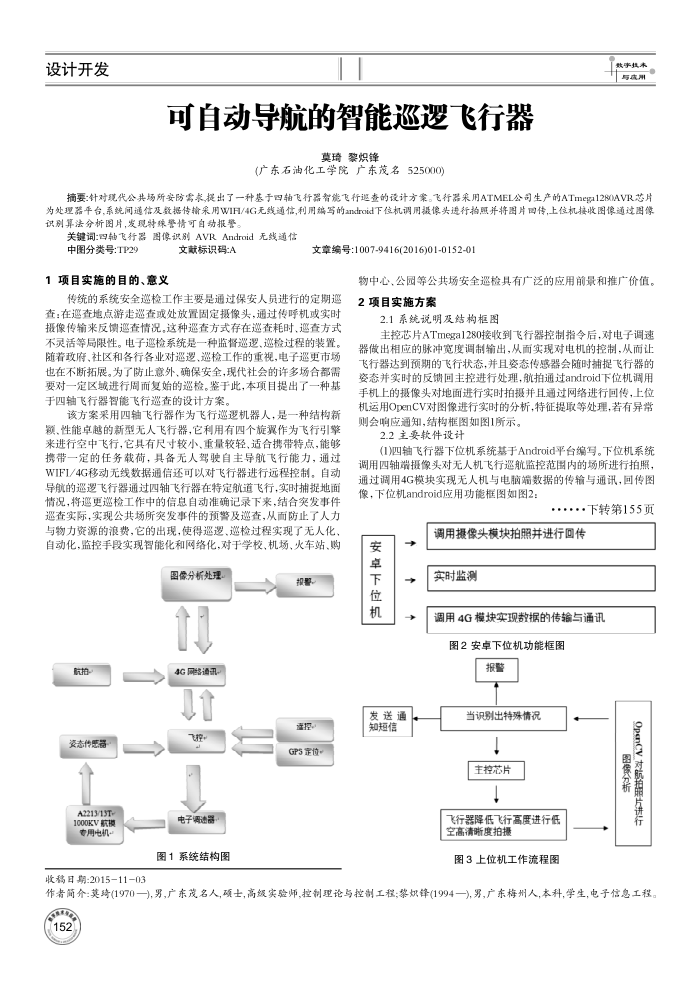
����оƬATmega1280���յ�����������ָ��Ե��ӵ�����������Ӧ��������ȵ������������ʵ�ֶԵ���Ŀ��ƣ��Ӷ��÷������ﵽԤ�ڵķ���״̬��������̬����������ʱ�������������̬��ʵʱ�ķ��������ؽ��д���������ͨ��android��λ�������ֻ��ϵ�����ͷ�Ե������ʵʱ���㲢��ͨ��������лش�����λ������OpenCV��ͼ�����ʵʱ�ķ�����������ȡ�ȴ����������쳣�����Ӧ֪ͨ���ṹ��ͼ��ͼ1��ʾ��
2.2��Ҫ�������
(1)�����������λ��ϵͳ����Androidƽ̨��д����λ��ϵͳ�������������ͷ�����˻�����Ѳ����ط�ͼ�ڵij����������գ�ͨ������4Gģ��ʵ�����˻�����Զ����ݵĴ�����ͨѶ���ش�ͼ����λ��androidӦ�ù��ܿ�ͼ��ͼ2��
����ת��155ҳ
��������ͷģ�����ղ����лش�
��
���
����֪ͨ����
ʵʱ���
����4Gģ��ʵ�����ݵĴ�����ͨѶͼ2����λ�����ܿ�ͼ
����
��ʶ��������������оƬ
���������ͷ��и߶Ƚ��еͿո�����������
ͼ3��λ����������ͼ
����飺Ī��(1970һ),�У��㶫ï����,˶ʿ,��ʵ��ʦ,������������ƹ���;����(1994һ),�У��㶫÷����,����,ѧ����������Ϣ���̡�
�������
���ں����ߵ�����С���Զ��������ϵͳ�����
�����ٽ��ռ������������ϵͳ�ؼ���������
SINS�MCNS��ϵ����Ը߿շ��������뾫�ȵ�Ӱ��
���ߵ絼�� �����������Ա������ѵ�̲�
���߿������ܵ���������ʵ��
�߿�־Ը���䣺��У����������������ԺУ��������������Ա�������ܣ�
GB/T 38997-2020 ��С�Ͷ��������˻����п����뵼��ϵͳͨ��Ҫ��
���ڶ�̬��Ϣ�����ܵ�����λ�÷���ϵͳ�ؼ���������Ӧ��