您当前的位置:首页>论文资料>基于鱼群的边缘检测改进算子
内容简介
 算法分析
算法分析基于鱼群的边缘检测改进算子
宋君毅
(天津理工大学天津300384)
事共与质用
摘要:为了在对鱼群进行连嫁检测时获取相对对闭的曲线,提高鱼群日标的检测效率和精准度。在比较分析了常用的Robert达缘检测算法, Sobel边缘检测算法、Canny边嫁检测算法的基础上,选取检测效果较好的Canny算法。但Camy算法会误将图像中一些真实的高频动缘平滑择,造成检测的边缘缺失,针对达点对该算于遗行改进。将Camny边缘检测算法与霍夫变换相结合的改进算子,能更好的获取鱼群的对闭动媒。
关键词:鱼计算机视觉边缘检测霍夫变损
中图分类号:TP391.41 1引言
文献标识码:A
随着人工智能、模式识别以及人机智能接口技术的发展与进步,机器视觉已经开始应用到分析动物的各种行为,渔业上也开始得到应用。鱼群会因为周图环境的改变行为发生变化,如Israeli与其他学者利用不同拍摄角度的两个机器监测氧气不足条件下卿鱼的应激行为p,JangMing等人利用高速镜头捕提了鱼瞬间启动时的运动学特性等。计算机对鱼的行为进行分析,重点是需要确定鱼的活动范围,也就是获取鱼群的轮廊。在视觉和图像处理的领域中,常用的获取鱼群轮哪的处理方法是边缘检测。本文通过对边缘算法的比
较选择之后,对算子进行改进并比较结果。 2传统的边缘检测算子
2.1Roberts边缘检测算子
Roberts边缘检测算子的计算方法是一种斜向偏差分的梯度也是一个向量,其中梯度值表示边缘强度,梯度方向垂直于边缘走向,这样就得到了边缘。Roberts边缘检测算子定义如下:
G=(x+1, y+1) (x) +[(+1,)(t,+1)(21) 为了节省计算时间,上式近似简化成式(2-2)
G = (x+1, y+1)f (x,y)+( +1, y) f (r,J +1)(22)
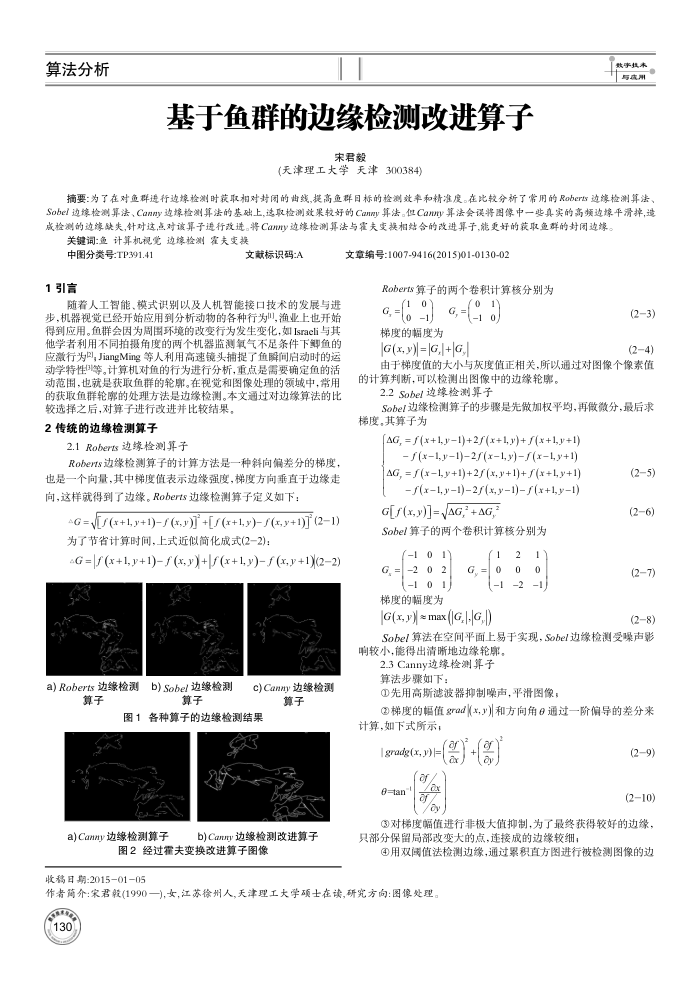
a)Roberts边综检测b)Sobe/边缘检测
算子
算子
c)Canmy边缘检测
算子
图1各种算子的边缘检测结果
a)Cammy边缘检测算子
b)Cany边缘检测改进算子
图2经过霍夫变换改进算子图像
收移日期:201501-05
文章编号:1007-9416(2015)01-0130-02
Roberrs算子的两个卷积计算核分别为
G, =
【01] 梯度的幅度为
G.
G(x, )=G,|+G,
10
(23)(24)
由于梯度值的大小与灰度值正相关,所以通过对图像个像素值的计算判断,可以检测出图像中的边缘轮廊。
2.2Sobel边缘检测算子
Sobe/边缘检测算子的步骤是先做加权平均,再做微分,最后求梯度。其算子为
G, = F(x+1,J1)+2F(x+1, y)+ (x +1,y+1)
(I+x)(tx)(14x)
G, = F(x 1,y+1)+2f (x, y+ 1)+ J(x+1,y+1)
J(x1,y1)2f(x,y1) f(x+1,y1) G[,r(x,)= G, +G,
Sobel算子的两个卷积计算核分别为
(1 01) 0 ='
10] 梯度的幅度为
(12 G,=000
I 1
G(x, )max (JGG
(25)(26)
(27)(28)
Sobel算法在空间平面上易于实现,Sobel边缘检测受噪声影响较小,能得出清晰地边缘轮廊。
2.3Canny边缘检测算子算法步骤如下:
①先用高斯滤波器抑制噪声,平滑图像:
②梯度的幅值grad(x,3)和方向角6通过一阶偏导的差分来计算,如下式所示;
Igradg(x,) 9=tar
(29)(210)
3对梯度幅值进行非极大值抑制,为了最终获得较好的边缘,只部分保留局部改变大的点,连接成的边缘较细;
④用双阅值法检测边缘,通过累积直方图进行被检测图像的边
作者简介:宋君较(1990一),女,江苏徐州人天津理工大学颈士在读,研究方向:图像处理 30