基于线性二次最优LQR的直线倒立摆控制系统研究分析
内容简介
 应用研究
应用研究基于线性二次最优LQR的直线倒立摆控制系统
研究分析陈洪万军黄琴
(重庆科创职业学院重庆永川402160)
摘要:本文以以自动控制领成典型的实验、教研设备
例立据系统作为研究对象,通过对控制原理分析、数学建模分析、状态反馈设计,
MATLAB仿真,然后在搭建的实验平台上用LOR方法端程实现对其最优控制。系统的成功起据与保持例立控制的实现验证了建模的正确性与控制方式的有效性。
关键词:例业据LQR方法最优控制
中图分类号:TP13 引言
文献标识码:A
文章编号:1007-9416(2011)08-0061-02
整理后得到传递函数:
创立摆系统是一个典型的高阶次、多变量、严重不稳定和强帮合的非线性系统.由于例立摆的行为与火箭飞行海洋钻井平台及两足机器人行走等有很大的相似性,因而对其研究具有较大的理论和实践意义.由于倒立摆系统所具有的上述特点,它已成为人们深人学习,研究和证实各种控制理论有效性的实验系统.本文中以直线双倒立摆为对象,采用线性二次最优控制LRQ对控制器进行设
计,并用Matlab进行了仿真验证。 1、倒立摆的数学模型
1.1数学模型的建立
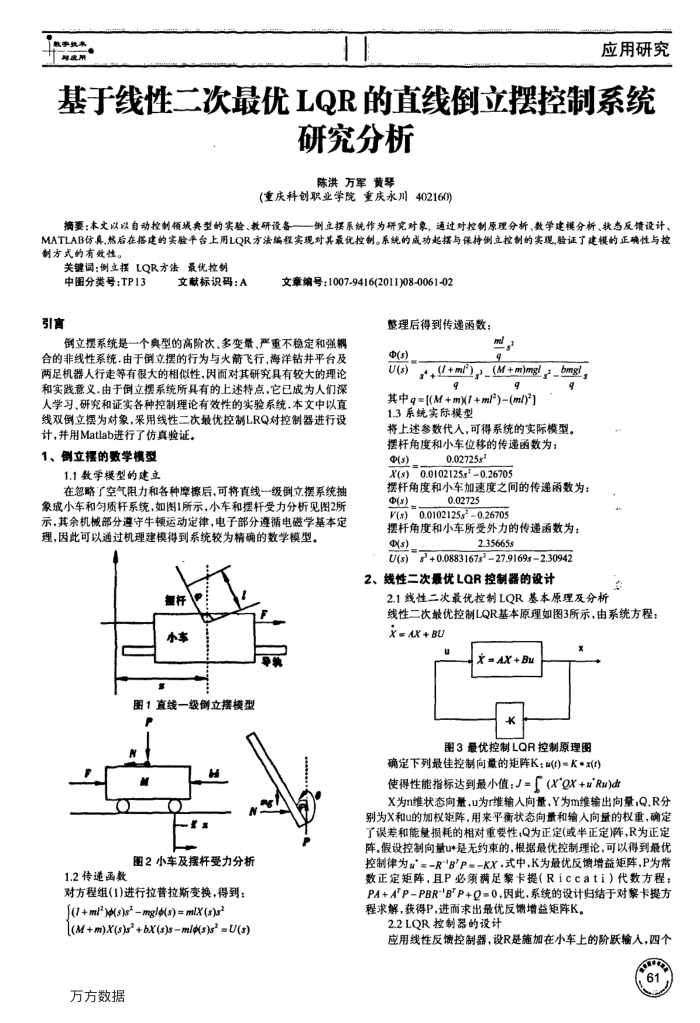
在忽略了空气阻力和各种摩擦后,可将直线一级倒立摆系统抽象成小车和匀质杆系统,如图1所示,小车和摆杆受力分析见图2所示,其余机械部分遵守牛顿运动定律,电子部分遵循电磁学基本定理,因此可以通过机理建模得到系统较为精确的数学模型。
摄杆小车
导物
图1直线一级倒立摆模型 P
N
围2小车及摆杆受力分析
1.2传递函数
对方程组(1)进行拉菩拉斯变换,得到:[(I + m/°)(s)s* mg/0(s) = mlX (s)s2
[(M + m)X(s)s* +bX(s)sm/d(s)s* = U(s) 万方数据
d(s)
9
5"+(/+ml),_(M+m)mgl_bmgl U(s)
9
q
其中q=[(M +m)/+m/)(ml)") 1.3系统实际模型
将上述参数代人,可得系统的实际模型。摆杆角度和小车位移的传递函数为:
(s)
0.02725s3
X(s)0.0102125s*0.26705
摆杆角度和小车加速度之间的传递函数为:
Q(s)
0.02725
V(s)0.0102125s0.26705
摆杆角度和小车所受外力的传递函数为:
(s)
2.35665s
U(s)+0.0883167s"27.9169s2.30942 2、线性二次最优LQR控制器的设计
2.1线性二次最优控制LQR基本原理及分析
线性二次最优控制LQR基本原理如图3所示,由系统方程: X =AX+ BU
u
=AX+By
图3最优控制LQR控制原理图
确定下列最佳控制向量的矩阵K:u(t)=k*x(n)
使得性能指标达到最小值:J=【(XOX+Ru)dt
X为n维状态向量,u为r维输入向量,Y为m维输出向量;Q、R分别为x和u的加权矩阵,用来平衡状态向量和输人向量的权重,确定了误差和能量损耗的相对重要性,Q为正定(或半正定)阵,R为正定阵。假设控制向量u*是无约束的,根据最优控制理论,可以得到最优控制律为a"=-R"B"p=-KX,式中,K为最优反馈增益矩阵,P为常数正定矩阵,且P必须满足黎卡提(Riccati)代数方程: PA+A'P-PBR'BP+Q=0,因此,系统的设计归结于对黎卡提方程求解,获得P,进而求出最优反馈增益矩阵K。
2.2LQR控制器的设计
应用线性反馈控制器,设R是施加在小车上的阶跃输人,四个
61
上一章:解析数字图书馆的海量信息管理体系结构研究
下一章:接入网用室内光缆的技术探究