您当前的位置:首页>论文资料>基于斜率变化的一种数字滤波算法
内容简介
 算法分析
算法分析基于斜率变化的一种数字滤波算法
段晓健王前波张谦王飞跃
(中北大学信息与通信工程学院山西太原030051)
摘要:在测量系统所采集的数字信号中,部含有各种噪声和干犹,要想获得准确的采集信号必频制弱或滤除择这要干扰信号。常见的数字滤波方法有很多,根据采集信号的不同可以选择透当的方法进行滤波处理,从而使采集信号特征明显化。本论文通过对吕形物体轮廊特征的分析提出了一种基于斜率变化的数字滤波算法。
关键调:数宇滤波轮康检测斜率滤波
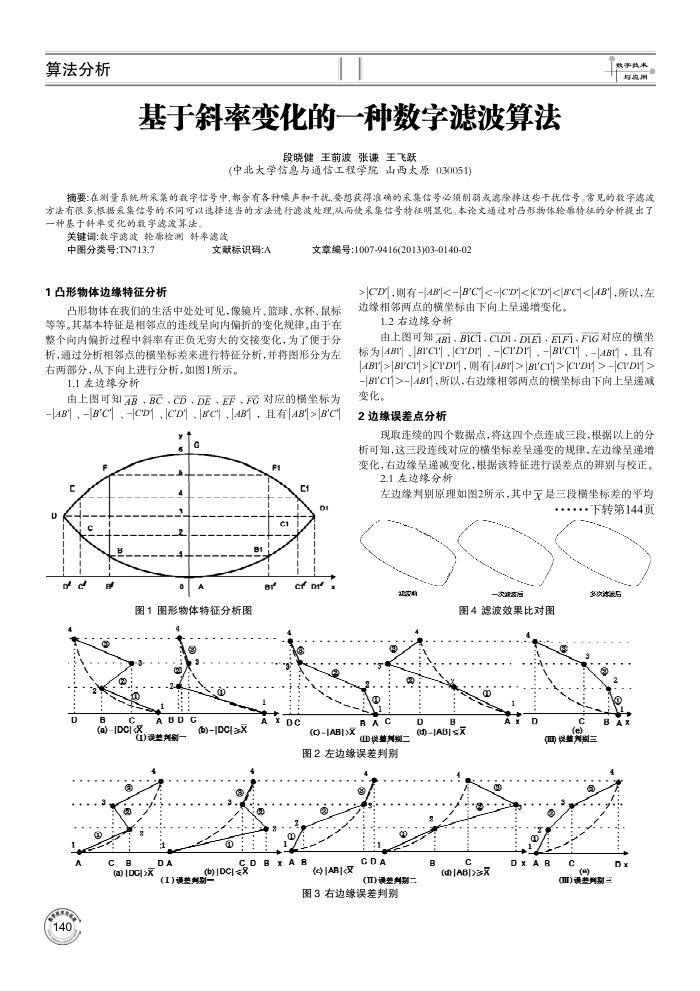
中图分类号:TN713.7 1凸形物体边缘特征分析
文献标识码:A
文章编号:1007-9416(2013)03-0140-02
>|CD],则有|4B
1.1左边缘分析
由上图可知AB、BC、CD、DE、EF、FG对应的横坐标为-|4B,BC,|CD1c'D,[BC,4B1,且有4B>B'C
yt e
F1
C1
D
C1
B1
。A
图1图形物体特征分析图
D 40
(a)IDCI
ABDG
(b)-[DCI≥X
(i)硬差列制-
CB
DA
(a) IDC|>x
Br
cfx
XDC
(c)IABI>X
1.2右边缘分析
由上图可知ABi、BICI、CIDi、DIEI、EIFi、FIG对应的横坐标为4B1、BI'C1、CID1、-CI'DI、BI'C"、-4B11,且有,1888 81'C11>-.4B11,所以,右边缘相邻两点的横坐标由下向上呈递减变化。
2边缘误差点分析
现取连续的四个数据点,将这四个点连成三段,根据以上的分析可知,这三段连线对应的横坐标差呈递变的规律,左边缘呈递增变化,右边缘呈递减变化,根据该特征进行误差点的辨别与校正。
2.1左边缘分析
左边缘判别原理如图2所示,其中是三段横坐标差的平均
.・下转第144页
次2
图4滤波效果比对图
:
RAC
(D模塑州别
图2左边缘误差判别
?
m
XAB
80%
(b) |DCIX
(I)通美别
(e) [AR|
0
B(d){ABIX
(d)[AB|>X
(IⅡ)通差判别二
图3右边缘误差判别
AX
D
c(e)
多次速8后 R
塑州划三@
DxAB
c(e)
(Im)误差列别三
Dx
上一章:冷轧厂生产物流信息化设计
下一章:冷连轧机测厚仪AGC控制系统故障应急处理方法