您当前的位置:首页>论文资料>液压挖掘机多路阀同步性能负载敏感性分析
内容简介
 6.08
6.082016
综述与专论
ey
当代化工研
液压挖掘机多路阀同步性能负载敏感性分析
O旷水章
(湖南交通工程学院湖南421009)
摘要:传统负流量控制多落阅逐行复合动作时,其各分支输出流量受负载压力影响较大,有动作协同性差的不足点,出于这一现象,据
建了负流量控制多落阅数学模型,对其负载敏高性进行了仿真分析,我到了影响其同步性能的敏感回素,关键词:液压挖据机;多路闵;同步性能
基金项目:湖南省教育厅高等学校科研项目(1500494)、湖南省大学生研究性学习和创新性实验计划项目(634)
中图分类号:T
文献标识码:A
LoadSensitivityAnalysisofHydraulicShovelMultitandemValveSynchronousProperty
Kuang Shuizhang
(Hunan Traffic Engineering College, Hunan, 421009)
Abstracf : Whent the traditional negative flow control mulri-way valve fakes the composite moves, its ourtpur low of each branch is influenced greatiy by the loading pressure and has zhe shortcoming of weak action synchronicity: In order to solve zhis problem, we establish the mathematical modef of negative flow conbrol mti-way va/ve and take simarlation analysis of its loading sensitivity, besides, we find out the sensitive factors infuvencing the sywchronization performance.
Key words : hydraalic shovel; multitandem wa/ve; Synchronous propert)
引言
伴随改革开放的继续推进,工业现代化继续深入,社会对工程机械的资源有效率和工作性能等提出了进一步的需要。目前国外对多路阀的研究已经相对成熟,已经大量的投入到生产使用当中,最知名的如德国的Rexroth、美国的 Husco和日本的Kyb等生产厂商。国内也有部分高等院校和研究机构对它进行过一些研究。本文通过对负流量节流控制系统的理论研究,搭建负流量控制系统的数学模型。通过 AMESim软件搭建挖掘机结构的仿真模型,对挖掘机在执行复合动作时多路阅的同步性能负载敏感性进行仿真分析,找
出影响其同步性能的敏感因素。 1.负流量控制系统研究
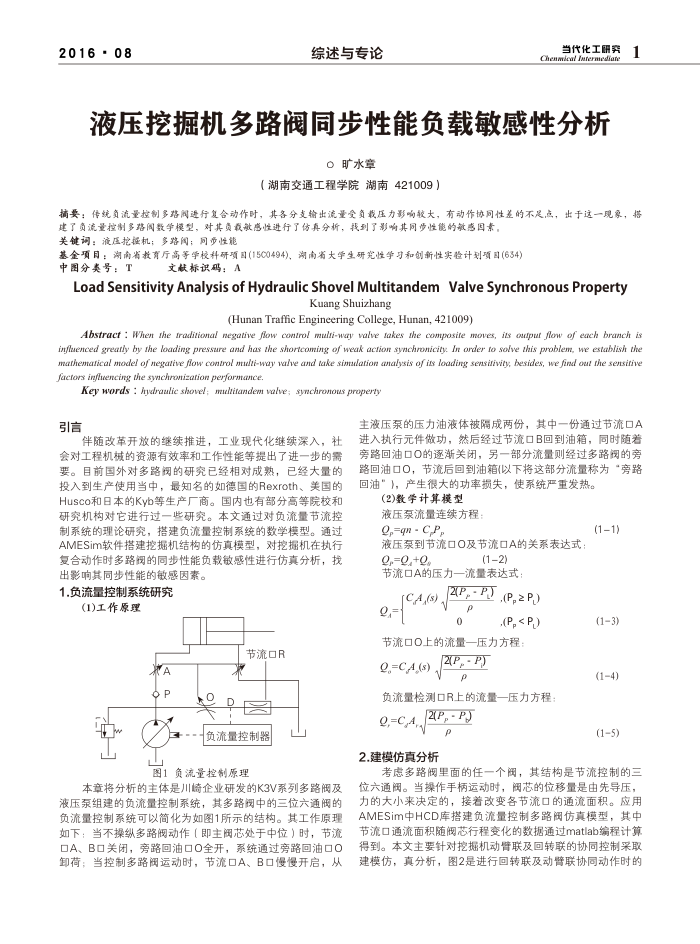
(1)工作原理
节流口R
A
op
o
负流量控制器
图1负流量控制原理
本章将分析的主体是川崎企业研发的K3V系列多路阀及
液压泵组建的负流量控制系统,其多路阀中的三位六通阀的负流量控制系统可以简化为如图1所示的结构。其工作原理如下:当不操纵多路阀动作(即主阀芯处于中位)时,节流口A、B口关闭,旁路回油口O全开,系统通过旁路回油口O 卸荷:当控制多路阀运动时,节流口A、B口慢慢开启,从
主液压泵的压力油液体被隔成两份,其中一份通过节流口A 进入执行元件做功,然后经过节流口B回到油箱,同时随差旁路回油口O的逐渐关闭,另一部分流量则经过多路阅的旁路回油口O,节流后回到油箱以下将这部分流量称为“旁路回油”},产生很大的功率损失,使系统严重发热。
(2)数学计算模型
液压泵流量连续方程
O,=qn - C,P,
液压泵到节流口O及节流口A的关系表达式:
0.=0,+0
(12)
节流口A的压力一流量表达式:
[2(PP)
.(P,≥P)
CA(s)
O
o
(P,
O.=C,A (s)
2(PP) p
负流量检测口R上的流量一压力方程:
0,=C,A
2(P,-P)
p
2.建模仿真分析
(11)(13)(14)(15)
考虑多路阀里面的任一个阀,其结构是节流控制的三位六通阀。当操作手柄运动时,阀芯的位移量是由先导压,力的大小来决定的,接着改变各节流口的通流面积。应用 AMESim中HCD库搭建负流量控制多路阀仿真模型,其中节流口通流面积随阀芯行程变化的数据通过matlab编程计算得到。本文主要针对挖掘机动臂联及回转联的协同控制采取建模仿,真分析,图2是进行回转联及动臂联协同动作时的
上一章:铜绿微囊藻对水中铜离子的吸附研究
下一章:酸烯加成酯化制备丙烯酸叔丁酯的进展与研究