����ǰ��λ�ã���ҳ>��������>����êϵ�������Ÿ���ϵͳ����о�
����êϵ�������Ÿ���ϵͳ����о�
���ݼ��
 ��ƿ���
��ƿ�������êϵ�������Ÿ���ϵͳ����о�
����
(�й����ӿƼ����Ź�˾����ʮ���о������ӱ�ʯ��ׯ050081)
���¹�ÿ����
ժҪ�������һ��3mֱ�������ϵ���Ÿ��ꡣ�ø���ʹ��˫��������ͨ����¶�������߽���ϵͳ������ά����ݡ�������ʧ��ˮ������ʹ�õ��ĵ�·����ˮ�����źŲɼ����洢��ʵʱ������ϵͳ��ϵ�ṹ�ɿ���������绬�������ۺϹ���µĵ�����������Դ����������ù�����Ϲ��磬����ֵ��ʱ�䳤�����������ڹ�����Ŀ�еõ�ʵ��Ӧ�á�
�ؼ��ʣ����Ÿ��ꣻ����èϵ����绬�������ߵ�Զ�̿���
��ͼ����ţ�TP212.9
���ױ�ʶ�룺A
�������Ÿ��겼�Ż��ձ�ݡ��������������źŽ���Ӱ��С����ʵ��ˮ��Ŀ�����źŲɼ������ϺõĴ���ƽ̨�������г�ʱ��۲�����ij��ϣ���ʹ��êϵ���Ÿ��ꡣ���Ľ���һ�ֲ���3mֱ������������Ÿ��꣬����ʧ��ˮ�������䱸��������ͨ���豸��ʹ������װ��绬����ʵ��ˮ���ˮ�µ�ͨ��ͨ����êϵ�ṹ��Լ�
��������ֵ��ʱ�䳤����ͨ��������֤�� 1ϵͳ���
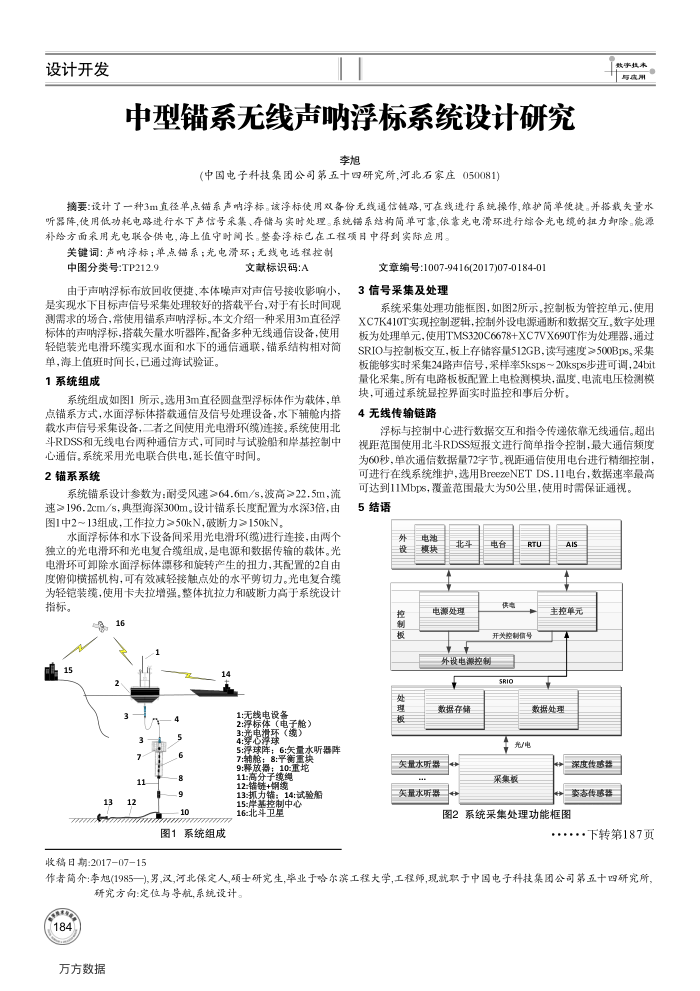
ϵͳ�����ͼ1��ʾ��ѡ��3mֱ��Բ����������Ϊ���壬����êϵ��ʽ��ˮ�渡�������ͨ�ż��źŴ����豸��ˮ�¸����ڴ���ˮ���źŲɼ��豸������֮��ʹ�ù�绬����)���ӡ�ϵͳʹ�ñ���RDSS�����ߵ�̨����ͨ�ŷ�ʽ����ͬʱ�����鴬�Ͱ���������
��ͨ�š�ϵͳ���ù�����Ϲ��磬�ӳ�ֵ��ʱ�䡣 2êϵϵͳ
ϵͳêϵ��Ʋ���Ϊ�����ܷ���>64.6m/s������>22.5m������>196.2cm/s�����ͺ���300m�����êϵ��������Ϊˮ��3������ͼ1��2��13��ɣ���������>50kN���ƶ�����150kN��
ˮ�渡�����ˮ���豸����ù�绬����)�������ӣ������������Ĺ�绬����縴������ɣ��ǵ�Դ�����ݴ�������塣��绬����ж��ˮ�渡����Ư�ƺ���ת������Ť���������õ�2���ɶȸ����Ქ����������Ч����Ӵ��㴦��ˮƽ����������縴����Ϊ����װ�£�ʹ�ÿ�������ǿ�����忹�������ƶ�������ϵͳ���ָ�ꡣ
16
15
2
1:���ߵ��豸
2�������壨���Ӳգ� 3����绬�����£�
6
11
13
12
9
10
mm
ͼ1ϵͳ���
�ո����ڣ�2017-07-15
5:����6
����ˮ������
����8��ƽ���ؿ�
:����
9:�ͷ�������10:����
11:�߷��ӿ��� 12-����+Կ��
13:ץ������14:������ 15:������������ 16:��������
���±�ţ�1007-9416(2017)07-0184-01 3�źŲɼ�������
ϵͳ�ɼ��������ܿ�ͼ����ͼ2��ʾ�����ư�Ϊ�ܿص�Ԫ��ʹ�� XC7K410Tʵ�ֿ����������������Դͨ�Ϻ����ݽ��������ִ�����Ϊ������Ԫ��ʹ��TMS320C6678+XC7VX690T��Ϊ��������ͨ�� SRIO����ư彻�������ϴ洢����512GB����д�ٶ�>500BS���ɼ����ܹ�ʵʱ�ɼ�24·���źţ�������5ksps~20ksps�����ɵ���24bit �����ɼ������е�·��������ϵ���ģ�飬�¶ȡ�������ѹ���ģ
�飬��ͨ��ϵͳ�Կؽ���ʵʱ��غ��º������ 4���ߴ�����·
������������Ľ������ݽ�����ָ�����������ͨ�š������ӾΧʹ�ñ���RDSS�̱��Ľ��м�ָ����ƣ����ͨ��Ƶ��Ϊ60�룬����ͨ��������72�ֽڡ��Ӿ�ͨ��ʹ�õ�̨���о�ϸ���ƣ��ɽ�������ϵͳά����ѡ��BreezeNETDS.11��̨�������������
�ɴﵽ11Mbps�����Ƿ�Χ���Ϊ50���ʹ��ʱ�豣֤ͨ�ӡ� 5����
����
���Ͱ�
���ģ��
��Դ����
��̨����
RTU
���ؿ����ź�
+
�����Դ����
SRUO
���ݴ��
ʧ��ˮ���ʵ��ˮ���
AIS ���ص�Ԫ
���ݴ�����Ԫ/��
��ȴ�����
�ɼ���
Ҫ̬������
ͼ2ϵͳ�ɼ��������ܿ�ͼ
������.��ת��187ҳ
����飺����(1985һ),��,��,�ӱ�������,˶ʿ������,��ҵ�ڹ��������̴�ѧ,����ʦ,�־�ְ���й����ӿƼ����Ź�˾����ʮ���о�����
�о�����λ�뵼��ϵͳ��ơ�
������
��һ�£����߲��¼���Ӧ���о�
��һ�£�dz̸DCS����ϵͳ�����ܶ����DZ�ͨѶʵ��