您当前的位置:首页>论文资料>基于四轴飞行器的空气污染应急监测系统
内容简介
 武事费事与高用
武事费事与高用应用研究
基于四轴飞行器的空气污染应急监测系统
王琦翔柳嘉敏全立地
(湖州师范学院,浙江湖州313000)
摘要:为了解决突发情况下的空气污染检测效率不高、实时性不够的问题,设计了一种基手四轴飞行器的应急监测系统,该系统主要包括四轴飞行器和检测装置两部分。四轴飞行器选用Pixhawk飞控作为主控制器,采用电子罗盘、陀螺仪、加速度计作为飞行器姿态信息监测与调整模块,以电调电露和无制直流电机组成飞行器动力模块,采用双闭环PID算法对飞行器进行飞行控制。
关键词:四轴飞行器;空气污染;应急监测
中图分类号:TN925.93
文献标识码:A
在突发空气污染事故中,污染源的方位,污染物的扩散方向都是极为重要的信息,获取这此信息需要对污染区域实施监测。传统的测量方法存在诸多的安全隐患,且测量效率不高,基于这种情况设计一套基于四轴飞行器的新型空气污染应急监测系统。遇到突发空气污染事件,操作人员在工作站上规划飞行路径,飞行器按照路径飞行,抵达测量点时悬停测量空气污染浓度,测量结果经无线模
块发送到工作站。待所有测量完成后,飞行器自动返航。 1飞行原理
四轴飞行器的飞行原理是利用两对旋翼相互作用来抵消每个旋翼产生的反浆矩。当飞行器的旋翼以相同速度旋转时.产生的升力大小相同,总的升力大于自重时做上升运动,等于自重时处于悬停状态,总的升力小于自重时做下降运动。当后方两个旋翼速度大于前方的速度时,飞行器前方飞行,反之则向后方飞行。同样地,左右运动原理与前后运动原理相同。这是四轴飞行器最基本的上下、
前后和左右运动原理 2系统硬件组成
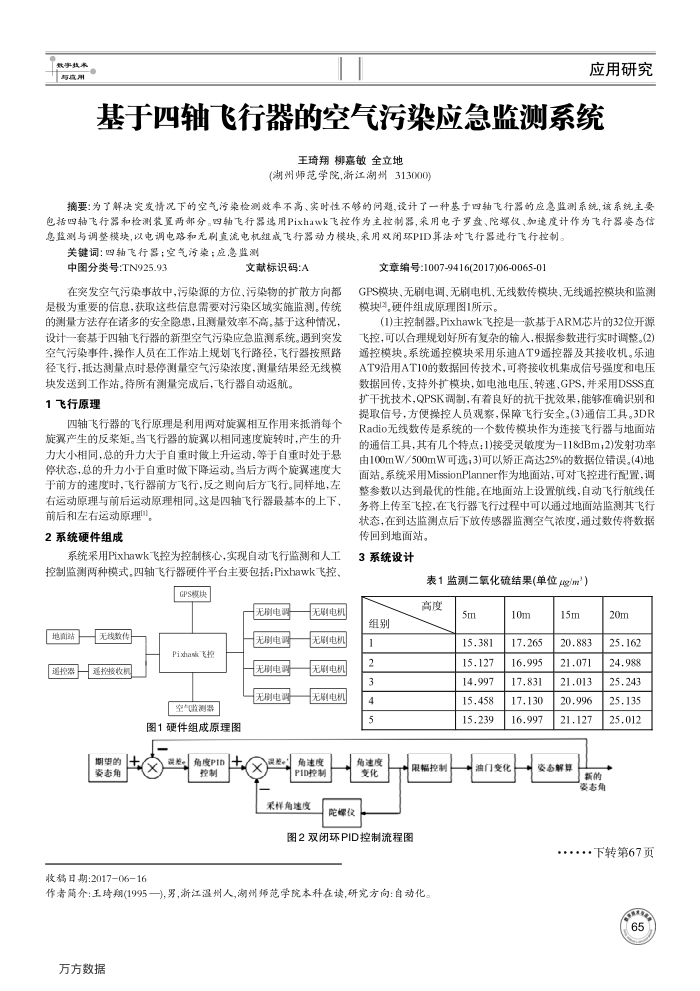
系统采用Pixhawk飞控为控制核心,实现自动飞行监测和人工控制监测两种模式。四轴飞行器硬件平台主要包括:Pixhawk飞控、
GPS模快
地站退控器
无线数传
Pixhask飞控
避控按收机
空气测器
图1硬件组成原理图
期望的要态角
收稿日期:2017-0616
角度PID 控制
无刷电调无刷电调无刷电调无刷电调
无制电机无制电机无刷电机无刷电机
角速度 PID控制
采样角速度
文章编号:1007-9416(2017)06-0065-0)
GPS模块,无刷电调、无刷电机、无线数传模块、无线遥控模块和监测模块2硬件组成原理图1所示。
(1)主控制器。Pixhawk飞控是一款基于ARM芯片的32位开源飞控,可以合理规划好所有复杂的输人,根据参数进行实时调整。(2) 遥控模块。系统遥控模块采用乐迪AT9遥控器及其接收机。乐迪 AT9沿用AT10的数据回传技术,可将接收机集成信号强度和电压数据回传,支持外扩模块,如电池电压,转速、GPS,并采用DSSS直扩干扰技术,QPSK调制,有着良好的抗干扰效果,能够准确识别和提取信号,方便操控人员观察,保障飞行安全。(3)通信工具。3DR Radio无线数传是系统的一个数传模块作为连接飞行器与地面站的通信工具,其有几个特点:1)接受灵敏度为-118dBm;2)发射功率由100mW/500mW可选,3)可以矫正高达25%的数据位错误。(4)地面站。系统采用MissionPlanner作为地面站,可对飞控进行配置,调整参数以达到最优的性能。在地面站上设置航线,自动飞行航线任务将上传至飞控,在飞行器飞行过程中可以通过地面站监测其飞行状态,在到达监测点后下放传感器监测空气浓度,通过数传将数据
传回到地面站。 3系统设计
表1监测二氧化硫结果(单位g/m)高度
组别 2 3 4 5
角速度变化
陀螺仅
限幅控制
图2双闭环PID控制流程图
作者简介:王琦翔(1995一),男,浙江温州人,湖州师范学院本科在读,研究方向:自动化。万方数据
5m
15.381 15.127 14.997 15.458 15.239
10m 17.265 16.995 17.831 17.130 16.997
油门变化
15m 20.883 21.071 21.013 20.996 21.127
态解算
新的
20m 25.162 24.988 25.243 25.135 25.012
姿态角
,下转第67页
6
上一章:宏基因组技术在环境保护及污染改善中的应用
下一章:环境生物技术在水污染控制中的应用