您当前的位置:首页>论文资料>汽车变道辅助雷达的一种动目标处理方法
内容简介
 数学执本与度用
数学执本与度用设计开发
汽车变道辅助雷达的一种动目标处理方法
吴鹏飞夏伟杰杨康
(南京航空航天大学电子信息工程学院江苏南京210000)
摘要:本文针对汽车变道时遇到的相关路况同题,提出了一种上下扫频频谱配对后遗行危险提取的方法,将监测范图内远离本车或者相对本车静止的日标进行屏藏去除,将靠近本车的日标保留进行后续处理。此方法对威助不到本车的日标以及道路栅栏和路边树木等杂波信号有较好的滤除效果,减轻了需达的数据处理压力。仿真结累证明了该方法的有效性。
关键词:调频连续波频谱配对动日标雷达
中图分类号:TP391.9
文献标识码:A
文章编号:1007-9416(2013)11-0117-02
调频连续波雷达具有分辨率高,结构简单,体积小等特点(2) 广泛应用于汽车雷达国。本文所闹述的汽车变道辅助雷达处于高速运动的汽车内,监控相邻车道后方10~50m内是否有车辆会对本车变道产生影响。在雷达处理数据的时候,先用频谱配对的方法进行多目标区别间,再用速度正负筛选的方法把固定杂波和远离本车的目标归于一类予以屏蔽,把间本车靠近的目标归为一类予以处理显示,此方法简化了处理流程,对杂波和远离本车的目标无需进行后续信号处理。与传统的每个目标都要进行处理的雷达系统相比较,
此方法大大的减少了雷达的数据处理量,提高了处理效率。 1FMCW信号分析和频谱配对
1.1FMCW信号分析
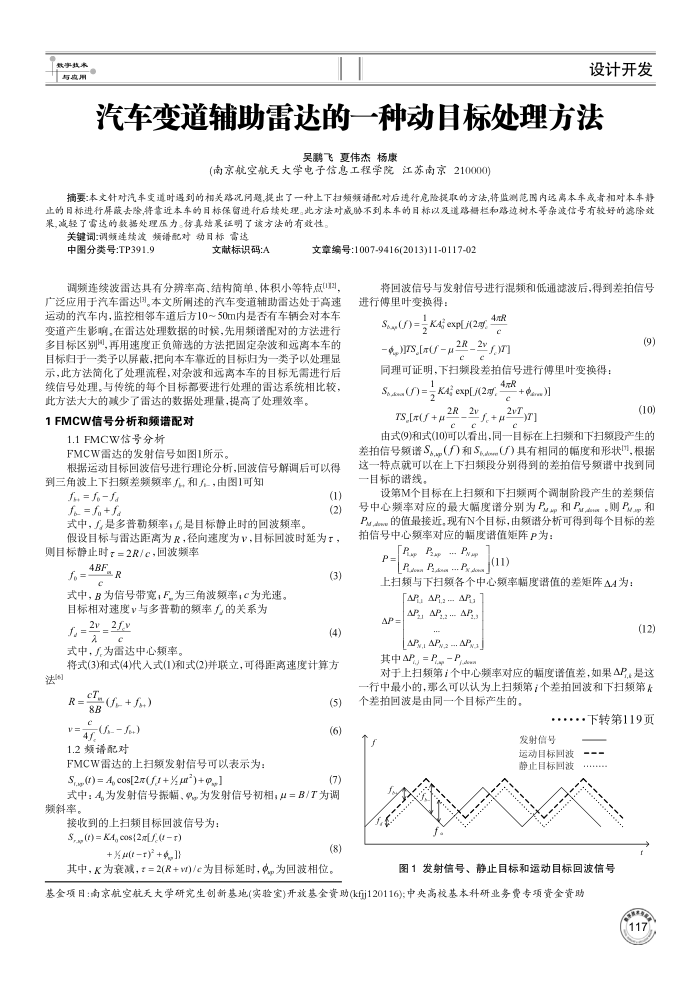
FMCW雷达的发射信号如图1所示。
根据运动目标回波信号进行理论分析,回波信号解调后可以得到三角波上下扫额差频频率,和f-,由图1可知
f =f-f. f =f+f
式中,是多普勒频率,是目标静止时的回波频率。
(1)(2)
假设目标与雷达距离为R,径向速度为V,目标回波时延为,则目标静止时=2R/c,回波频率
4BFaR
f。
式中,B为信号带宽;F_为三角波额率;c为光速。目标相对速度v与多普勒的频率了的关系为
2v_2f.y T
ae
式中,为雷达中心频率。
(3)(4)
将式(3)和式(4)代入式(1)和式(2)并联立,可得距离速度计算方法
cT R=
(f+f) 8.8
(-) 4
1.2频谱配对
FMCW雷达的上扫频发射信号可以表示为:
(5)(6)
S,(r) = 4, cos[2x(U,J + Yμr)+ P, ]
(7)
式中:4,为发射信号报幅,%为发射信号初相;μ=B/T为调频斜率。
接收到的上扫频目标回波信号为:
S, _(c) = K4, cos(2nLf,(t r)
+ X(t r)2 +g. ])
(8)
其中,K为衰减,t=2(R+w)/c为目标延时,为回波相位。
将回波信号与发射信号进行混频和低通滤波后,得到差拍信号进行傅里叶变换得:
Su)=4iexpL(2g.4
2R_2yT
S,[μ
ec
同理可证明,下扫频段差拍信号进行傅里叶变换得:
Sda UD:
4元R
K)expL(2g。
+) e
2R2v
2vT
TS_[( + μ-
)
J + μ-
(9)(10)
由式(9)和式(10)可以看出,同一目标在上扫频和下扫频段产生的差拍信号频谱Ssm()和Sm()具有相同的幅度和形状,根据这一特点就可以在上下扫频段分别得到的差拍信号额谱中找到同目标的谱线。
设第M个目标在上扫频和下扫频两个调制阶段产生的差频信号中心频率对应的最大幅度谱分别为P和P。则P量和 P%的值最接近,现有N个目标,由频谱分析可得到每个目标的差拍信号中心额率对应的幅度谱值矩阵P为:
[Pu Pag... Pwap ps
(11)
Paon Pidea -..Px da
上扫频与下扫额各个中心额率幅度谱值的差矩阵44为:
[ .a. P,
AP=
AP,AP,.. AP.
(12)
I P., APwa -. Pw, 其中AP,=PP.a
对于上扫频第1个中心频率对应的幅度谱值差,如果AP是这-行中最小的,那么可以认为上扫频第;个差拍回波和下扫频第个差拍回波是由同一个目标产生的。
...下转第119页
发射信号
运动目标回波静止目标回波
图1发射信号、静止目标和运动目标回波信号
基金项目:南京航空航天大学研究生创新基地(实验室)开放基金资助(kfi120116);中央高校基本科研业务费专项资全资助
1
上一章:纯电动汽车用VRLA蓄电池的研发
下一章:汽车电子控制技术的应用现状与发展趋势浅析