����RBF������ĵ綯��ֱ��ת�ؿ��Ƽ���̽��
���ݼ��
 ������
����������RBF�������
�綯��ֱ��ת�ؿ��Ƽ���̽��
��־��
(�Ƹ����Զ�������˾�ӱ���ɽ063000)
���ؼ���
ժҪ�����ľ��Ƚ�����ֱ��ת�ؿ��Ƽ�����������ķ�չ���������о���״,֮�����첽�綯�������������ѧģ�����֣����˿ռ��ѹʧ����������ۺ�ֱ��ת�ؿ��Ƶĺ���˼��,�������첽�綯���Ĺ۲�ģ�ͺ�ֱ��ת�̿���ϵͳ��ʵ�ַ�����Ϊ�˶Դ�ͳ����ϵͳ���иĽ����Ż�,���������������ۣ�����˻���RBP������Ŀ���,����˲�����������濪�ر�ʵ�ֿռ�ʧ�����Ƶķ���,ֳ����ת�صĹ۲�ģ�͵��������������Ż���
�ؼ����������綯��������PID������ͼ����ţ�TD672
���ױ�ʶ�룺A
���±�ţ�1007-9416(2015)04-0009-01
Abstractin this paper, we fint introduce the direct torque control and neural network technique development and domestic and foreign research status, followed by the mathematical model of asynchronous motor and inverter starting, describes the core idea of the theory of space voltage vector and direct torque control, given the observation model of asynchronous motor and direct torque control system realization scheme, In order to improvement and optimization of the traditional control system, the introduction of the theory of neural network, design the control based on RBF neural network is proposed using neurnl networks to replace the switching table of space vector modulation method, fux and torque observation model also uses neural network optimization.
Key Words:asynchronous motor; direct torque control; neural network; PID control
��������GA�㷨ǿ���ȫ������������RBF�����������
���Ż����Ӷ���֤�Ľ�RBF�������������ϵͳ���ܡ� 1RBF�����������ԭ��
RBF������������ǵ��͵�ǰ�����������DZ��ض������ģ�͡��ÿ�����ͨ��ѧϰ����PID�����������������Զ�����ϵͳ��Ȩֵ��ʹ��������ֵu_(k)Ϊ�㣬Ԥ�����ֵu(k)=u,(k),������RBF ������������������PID������������ϵͳ���ֽϴ����ʱ��ϵ
ͳ�ִ�����������PID�������� 2GA-RBF�㷨
���ȣ�����GA�㷨�Ż�RBF������IJ��������õ����ŵ�����ṹ��������������ֱ�Ϊ����������Ȩֵ(��������������),����ʧ����c)����Σ�ͨ������Ե綯����ֱ��ת�ؽ��п��ơ����㷨��������7�����裬
(1)�����Ʊ��룺����Ҫ�Ż���3��RBF������������ж����Ʊ��룬����Խ������Խ�ߣ����������������GA�㷨�������ռ䣬���IJ����ı��볤���趨Ϊ10.(2)��ʼ��Ⱥȷ���������ʼȺ��
10
/a ������
05
0.5
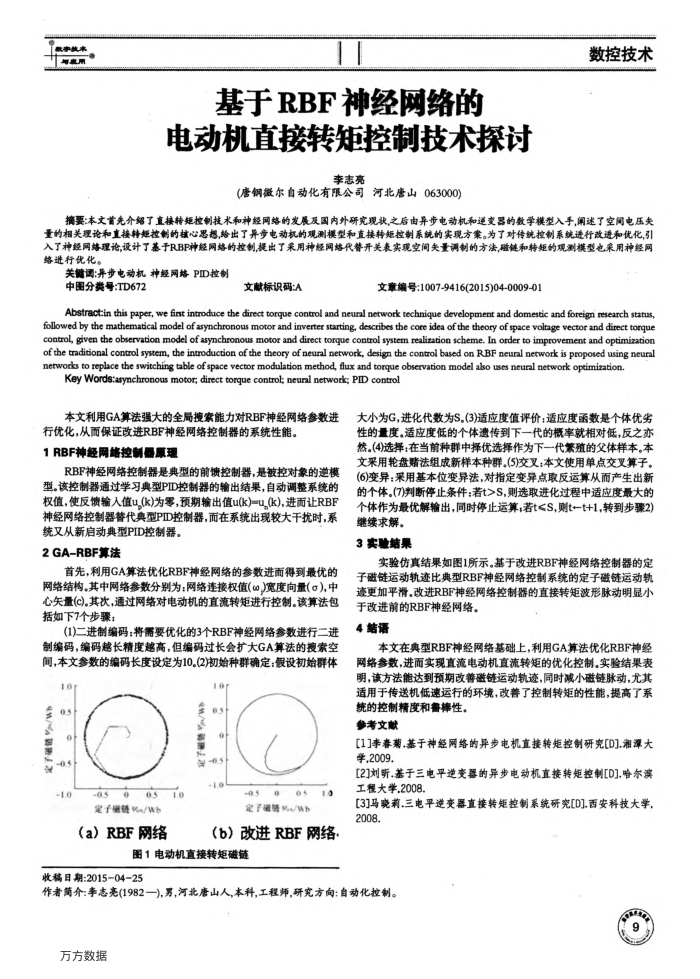
��������Vn/Wb��a��RBF����
1.0
a ��
1.0 es
-05
05
��������Ma/Wb
10
��b���Ľ�RBF����
ͼ1�綯��ֱ��ת�ش���
��СΪG����������ΪS.(3)��Ӧ��ֵ���ۣ���Ӧ�Ⱥ����Ǹ��������Ե����ȡ���Ӧ�ȵ͵ĸ����Ŵ�����һ���ĸ��ʾ���Եͣ���֮��Ȼ����4ѡ���ڵ�ǰ��Ⱥ������ѡ����Ϊ��һ����ֳ�ĸ������������IJ������̶ķ������������Ⱥ��(5)���棻����ʹ�õ��㽻������(6)���죺���û���λ���취����ָ�������ȡ������Ӷ��������µĸ��塣(7)�ж�ֹͣ��������t>S����ѡȡ������������Ӧ�����ĸ�����Ϊ���Ž������ͬʱֹͣ���㣬��t
ʵ���������ͼ1��ʾ�����ڸĽ�RBF������������Ķ��Ӵ����˶��켣�ȵ���RBF���������ϵͳ�Ķ��Ӵ����˶��켣����ƽ��.�Ľ�RBF�������������ֱ��ת�ز�����������С
�ڸĽ�ǰ��RBF�����硣 4����
�����ڵ���RBF����������ϣ�����GA�㷨�Ż�RBF���������������ʵ��ֱ���綯��ֱ��ת�ص��Ż����ơ�ʵ�����������÷����ܴﵽԤ�ڸ��ƴ����˶��켣��ͬʱ��С�������������������ڴ��ͻ��������еĻ����������˿���ת�ص����ܣ������ϵ
ͳ�Ŀ��ƾ��Ⱥ�³���ԡ��ο�����
[1]����.������������첽���ֱ��ת�ؿ����о�[D].��̶��ѧ��2009
[2]����.��������ƽ��������첽�綯��ֱ��ת�ؿ���[D].���������̴�ѧ.2008.
[3]������.����ƽ�����ֱ��ת�ؿ���ϵͳ�о�[D].�����Ƽ���ѧ�� 2008.
�ո����ڣ�2015-04-25
����飺��־��(1982һ),�У��ӱ���ɽ��,���ƣ�����ʦ���о������Զ������ơ�
6
������