您当前的位置:首页>论文资料>移动式焊缝跟踪机器人跟踪精度估算方法研究
内容简介
 精密制造与自动化
精密制造与自动化制造业信息化
2017年第3期
移动式焊缝跟踪机器人跟踪精度估算方法研究
牛方方
(陕西国防工业职业技术学院西安710300)
摘要焊接过程中对焊缝能否进行精确跟踪控制是衡量焊缝性能优劣的重要指标,也是焊缝跟踪产业化中较为关键的一步。为了提高焊接过程中焊缝的跟踪控制精度,通过对自由度焊接机器人模型进行简化,提出了定步长和变步长的焊缝跟踪精度分析方法,建立了在不同控制方案下的焊缝跟踪精度的数学模型。通过定步长与变步长的焊缝跟踪精度模型,得到了两种不同模型下的焊缝跟踪精度分析方法,最后通过仿真分析验证了定步长和变步长的焊缝跟踪精度分析方法的有效性和正确性。
关键词焊缝跟踪控制定步长和变步长跟踪精度
焊接机器人具有高效率、高质量、高可靠性、
通用性强等特点而广泛应用于船舶、机械加工、核工业、航空航天等制造业-"。焊缝跟踪机器人跟踪精度是衡量焊缝跟踪性能优劣的重要指标,是焊缝跟踪产业化中较为关键的一步[4-7)。
研究一种有效的焊缝跟踪精度分析算法对于自动化焊接具有非常重要的意义,而国内外众多学者已针对机器人位姿精度进行了研究,并以此形成了一套完整的机器人位姿精度理论体系.9)。而移动焊缝跟踪机器人是利用焊缝跟踪传感器对焊缝进行跟踪分析的一种非完整约束机构,直接建立机器人位姿精度跟踪模型相对比较困难。对于非完整的约束机构,如果直接对焊缝跟踪精度进行计算则更加困难。为此建立一种简单焊缝跟踪精度模型以及有效的分析方法,对于提高焊缝跟踪精度具有重要作用[ei-ot
为了提高焊接过程中焊缝的跟踪控制精度,通过对自由度焊接机器人模型进行简化,提出了定步长和变步长的焊缝跟踪精度分析方法,实现了在不同控制方案下的焊缝跟踪精度数学模型的建立。通过定步长与变步长的焊缝跟踪精度模型,得到了两种不同模型下的焊缝跟踪精度分析方法。最后通过仿真分析验证了本文定步长和变步长的焊缝跟踪精
度分析方法的有效性和正确性。万方数据
1焊丝跟踪机器人跟踪度模型 1.1定步长的焊缝跟踪精度模型
假设焊接机器人的移动路径为沿直线行走,与
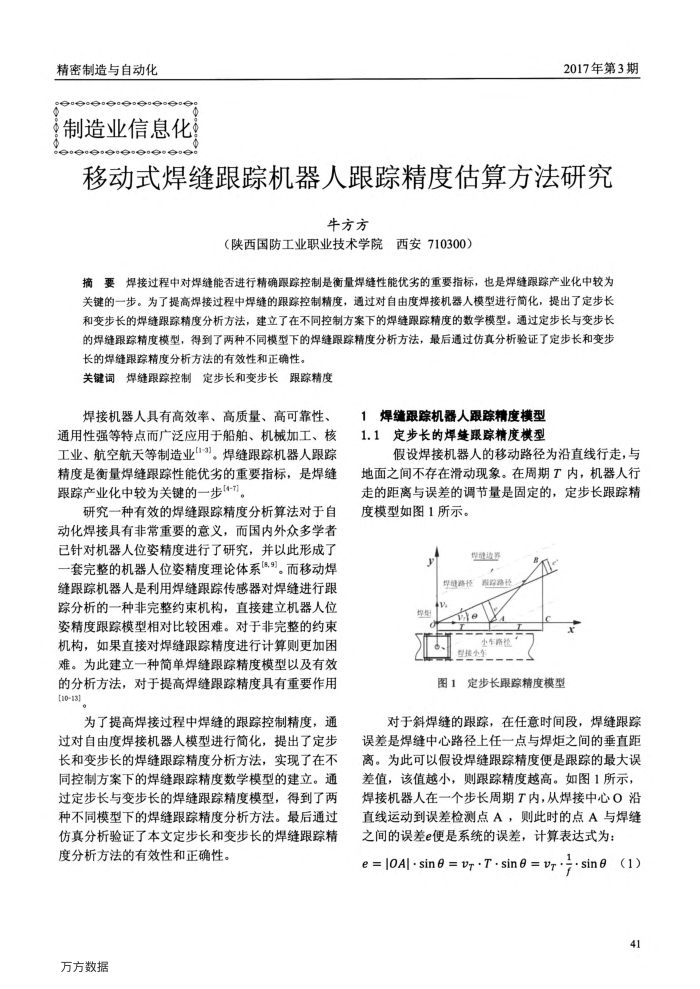
地面之闻不存在滑动现象。在周期T内,机器人行走的距离与误差的调节量是固定的,定步长跟踪精度模型如图1所示。
理续达券学线路径联踪路检
焊距
Me
X
小车路整
型接小争
图1定步长跟踪精度模型
对于斜焊缝的跟踪,在任意时间段,焊缝跟踪误差是焊缝中心路径上任一点与焊炬之间的垂直距离。为此可以假设焊缝跟踪精度便是跟踪的最大误差值,该值越小,则跟踪精度越高。如图1所示焊接机器人在一个步长周期T内,从焊接中心O沿直线运动到误差检测点A,则此时的点A与焊缝之间的误差e便是系统的误差,计算表达式为:
e=OA|・sin=V・T・sin@=V・
・sing
(1)
41
上一章:数控机床位置不相关热误差在线补偿方法
下一章:基于GPRS的清管器远程定位跟踪系统