����IMM�㷨��˫�ֲ������������˵Ķ�λ�㷨
���ݼ��
 �����������Զ���
�����������Զ���2017���2��
����IMM�㷨��˫�ֲ������������˵�
��λ�㷨˥������
�����Ϲ�ҵְҵ����ѧԺ��������473000��
ժҪ���ƶ������˵Ķ�λϵͳ�У��������˲����㷨�Խ�����ַ����ԡ��ṹ���ӵļ���ʱ����λ���Ȳ��ߣ�Ч���������룬��Զ�άƽ�������ǹ����˶���˫�ֻ����˶�λ���⣬���һ�ֻ��ڽ���ʽ��ģ���㷨���ƶ������˸��ٶ�λ������ʵ���������·����ڻ��������ǹ����˶�ʱ���ܹ������˲���ɢ��Ѹ�ٵ��ȶ�������ʵ�ֻ����˵ľ�ȷ���ٶ�λ��
�ؼ����ƶ������˿������˲�����ʽ��ģ�Ͳ����˲�
��ʽ�ƶ������˸��ݳ�����Ŀ�IJ�ͬ���ɻ���Ϊ���֡�˫�֡����ֺ�����ʽ�ƶ�������1]�������о�����Ϊ˫�ֲ����������ƶ������ˣ����ص��ǽṹ���������������һ���������
Ŀ�궨λϵͳ�У��ѵ��ǽ�����������Ϲ������⣬������ѧ��Ҳ���ö��ַ������д���������ǿ3���˲���UKF�㷨�����������ߵ��涯��ѧģ
�ͣ��Լ����ƶ�������������ȷ�����ش�����Ӱ�죬���÷���Ԥ����Ʋ�������ʵʱ�Ĵ�����������Ϣ������Ҫ��ϵͳ�еĸ�������Ϊ����ص������������Խ�����������ṹ�Ŀ���˼�룬����λ��Ϊϵͳ���������⣬����EKF��ϵͳ������״̬���ƣ��Ӷ�ʵ�ָ��ٶ�λ���÷���������Ч�������ɻ�������������Ӱ�죬�����ڷ������˶�ʱ��״̬��λ���Ȳ��ߡ�
��������ƶ���������һάƽ���еķ����˶������һ�ֻ��ڽ���ʽ��ģ���㷨��IMM�����ƶ������˸��ٶ�λ���������㷨������Ч�����Ƶ���ģ��ʱ��Ŀ��ģ����Ŀ����˶�״̬��һ��ʱ����ɵ��������ƶ��������Ƿ���ٻ���ת�䶼�ܹ�ʵ�ֿ��ٶ�λ��
1�ƶ������˵��˶�ģ��
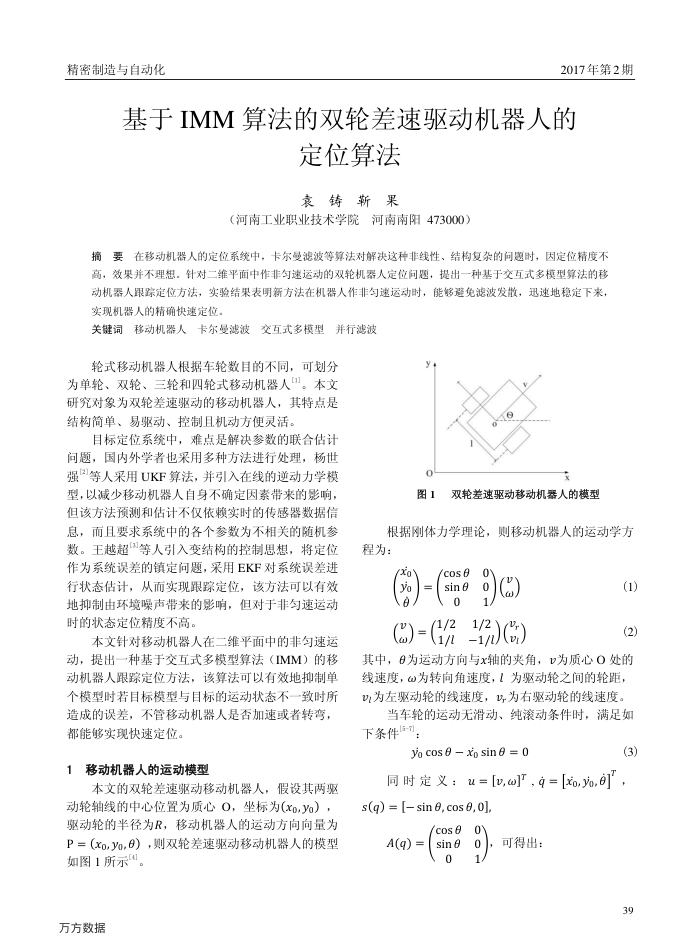
���ĵ�˫�ֲ��������ƶ������ˣ������������������ߵ�����λ��Ϊ����O������Ϊ(xo.�������ֵİ뾶ΪR���ƶ������˵��˶���������Ϊ P=��xo.yo.������˫�ֲ��������ƶ������˵�ģ��
��ͼ1��ʾ��������
ͼ1
˫�ֲ��������ƶ������˵�ģ��
���ݸ�����ѧ���ۣ����ƶ������˵��˶�ѧ����Ϊ��
xo yo e
Ycos6 sin 0
0
0 1
()-G/2 1/2)((1/l-1/(r
(1)(2)
���У�Ϊ�˶�������x��ļнǣ�vΪ����O�������ٶȣ�6Ϊת����ٶȣ���Ϊ������֮����־࣬ VΪ�������ֵ����ٶȣ���Ϊ�������ֵ����ٶȡ�
�����ֵ��˶�����������������ʱ��������������[5-]��
yo cos xp sin = 0
(3)
ͬʱ���壺u=[v,]T��9=[xo,yo,�� s(q) = [ sin , cos 6, o],
Ycos6
0
A(q)
sin 0
0 1/
�ɵó���
39