基于手机Android操作系统自动控制一种移动机器人
内容简介
 精密制造与自动化
精密制造与自动化基于手机Android操作系统自动控制
一种移动机器人
前苏苏1景龙张文刚赵建忠(1.江苏大学机械工程学院江苏镇江212013: 2.江苏大学电气信息工程学院江苏镇江212013)
2016年第4期
摘要以ARM7LPC2138主控板、默认4路传感器端口、6路舵机端口,支持蓝牙配对,支持C语言编程为依据,设计了一种移动机器人・根据TRIZ理论功能分解树和发明原理序号为“1、17、23、13",进行了移动机器人的结构设计和创新设计,提出了一种避障中分线快速检测算法,分析了TTL信号传感器接收端在前方5cm以内有障碍物时触发,可用于绕障、穿越障碍等。在机器人控制中,以ARM7主控板C语言环境,编程和烧写文件。而Android手机操作系统,编写蓝牙中断函数到机器人ARM7主控板,由手机执行对机械手的控制操作。能机控制采用指令模式,通过ARM7调用库函数以控制机器人的各个舵机,使机器人按照相应的策略运动,设计方法具有广阔的应用前景和创新价值。
关键词移动机器人ARM7TRIZ理论传感器蓝牙配对手机
国内外学者一直在研究移动机器人。由于移动机器人的物理特性不同,控制需要调整路径和移动方向,使机器人按照相应的策略运动,在避开障碍物时,文献[1]提出的迷你型概念车以计算机为基础,采用顺序的程序流程控制,编写碰撞转向和红外避障程序实现智能控制:文献[2]提出了机器人控制系统的硬件,采用了协调级与执行级的二级结构。
本文设计了一种移动“搬运机器人”,采用手机 Android操作系统控制嵌入式ARM7硬件和软件,在ARM7主控板C语言环境中编程和烧写文件,能机端口根据程序命令输出特定的PWM信号,驱动机器人的各个能机运动,手机Android操作系统的蓝牙设备将命令发送到ARM7中,由安卓手机执行对机械手的控制",比较探索者机器人的AVR手柄
控制精度更高。 1系统总体方案 1.1功能设计
移动机器人应具备识别物体并准确定位功能同时根据目标位置,选择合适的路径避开障碍物3 将物体搬运到指定位置,为此确定方案时考患了
*基金项目:
江苏大学第14批大学生科研立项项目万方数据
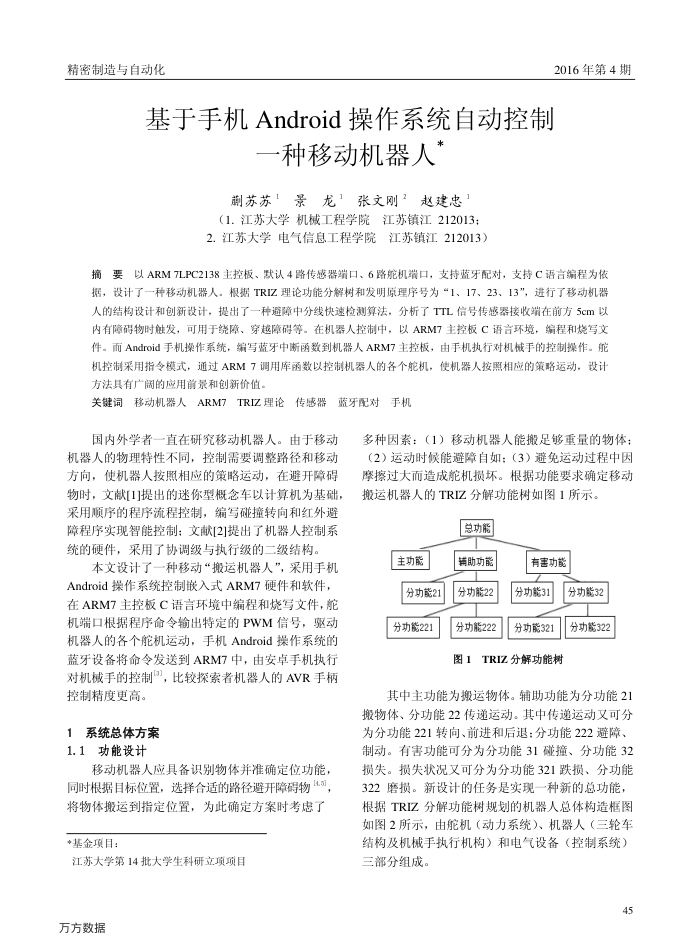
多种因素:(1)移动机器人能搬足够重量的物体:(2)运动时候能避障自如:(3)避免运动过程中因摩擦过大而造成能舵机损坏。根据功能要求确定移动搬运机器人的TRIZ分解功能树如图1所示。
总功能
主功能分功能21 分功能221
辅助功能分功能22 分功能222
有害功能
分功能31 分功能321
图1TRIZ分解功能树
分功能32 分功能322
其中主功能为搬运物体。辅助功能为分功能21 搬物体、分功能22传递运动。其中传递运动又可分为分功能221转向、前进和后退:分功能222避障、制动。有害功能可分为分功能31碰撞、分功能32 损失。损失状况又可分为分功能321跌损、分功能 322磨损。新设计的任务是实现一种新的总功能,根据TRIZ分解功能树规划的机器人总体构造框图如图2所示,由能机(动力系统)、机器人(三轮车结构及机械手执行机构)和电气设备(控制系统)三部分组成。
45