浅析区管THALES自动化 系统升级前后雷达数据处理机制
内容简介
 数事我本与度用
数事我本与度用浅析区管THALES自动化系统升级前后雷达数据处理机制
毛艳华
(华北空管局技术保障中心,北京100015)
应用研究
摘要:本文首先介绍了自2004.年投入使用的THALESV6.7.2自动化系统采用雷达前置处理RFP报务器和雷达数据处理RDP服务器究成的雷达马赛克数据处理机制。随后着重研究了目前刚喇升级投入使用的THALESV5自动化系统采用的多探测器航速处理功能MSTS 服务器完成的雷达数据处理机制,并分析了新的雷达数据处理机制的先进性
关键词:雷达数据处理;雷需达前置数据处理;多探测器航连处理;IMM滤波器
中图分类号:TN957.51
文献标识码:A
北京区管中心使用的主用THALES自动化系统于2003年开始建设安装,于2004年建成投入使用。2008年4月,北京区管THALES 自动化主用系统中接人了北京终端区(BTA),天津空管分局(TCU) 自动化系统,三地自动化系统一起共享北京区管THALES自动化系统的飞行数据处理(FDP)功能。北京区管、北京终端区和天津进近 THALES自动化系统形成了集成一体化的大系统运行模式。
由于华北区域高空接管空域扩大,雷达引接数量增加和飞行量的不断增加,THALES自动化系统也逐渐出现硬件老化等间题,因此从2011年启动了三大区管的THALES自动化系统的软硬件升级项目。此次软硬件升级项目实际是在不影响目前THALESV6.7 2自动化系统运行的前提下,新建了一套THALESV5自动化系统, THALESV5自动化系统的雷达信号仍从THALESV6.7.2的 SPLITER接人,
THALESV5自动化系统和原有的THALESV6.7.2无论从软件上还是硬件上都有很大不同。服务器采用了性能更好的HP380 和HPZ420,而从网络结构上,一楼设备机房和二楼管制大厅之间也改为光纤传输,并且二楼的管制大厅的交换机采用了堆叠技术。 V5新系统也不再基于UNIX操作系统,而是基于LINUX操作系统,
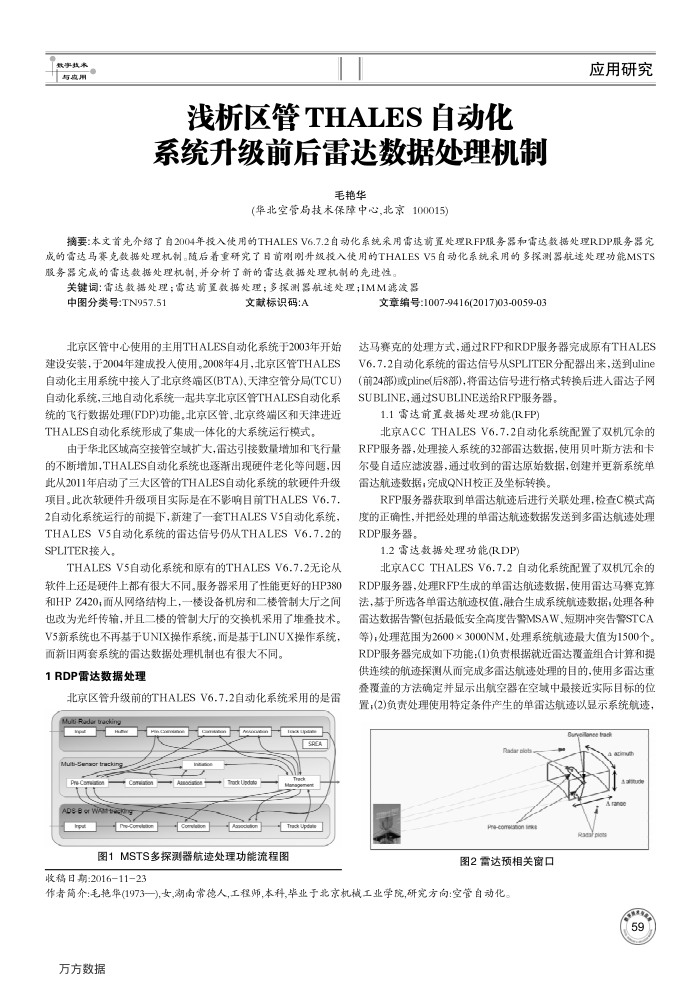
而新旧两套系统的雷达数据处理机制也有很大不同。 1RDP雷达数据处理
北京区管升级前的THALESV6.7.2自动化系统采用的是雷 MuiRadar bruckir
图1MSTS多探测器航速处理功能流程图
收稿日期:2016-11-23
文章编号:1007-9416(2017)03-0059-03
达马赛克的处理方式,通过RFP和RDP服务器完成原有THALES V6.7.2自动化系统的雷达信号从SPLITER分配器出来,送到uline(前24部)或pline(后8部),将雷达信号进行格式转换后进人雷达子网 SUBLINE,通过SUBLINE送给RFP服务器。
1.1雷达前置数据处理功能(RFP)
北京ACCTHALESV6.7.2自动化系统配置了双机元余的 RFP服务器,处理接入系统的32部雷达数据,使用贝叶斯方法和卡尔曼自适应滤波器,通过收到的雷达原始数据,创建并更新系统单雷达航速数据;完成QNH校正及坐标转换。
RFP服务器获取到单雷达航迹后进行关联处理,检查C模式高度的正确性,并把经处理的单雷达航迹数据发送到多雷达航速处理 RDP服务器。
1.2雷达数据处理功能(RDP)
北京ACCTHALESV6.7.2自动化系统配置了双机允余的 RDP服务器,处理RFP生成的单雷达航速数据,使用雷达马赛克算法,基于所选各单雷达航动迹权值,融合生成系统航速数据;处理各种雷达数据告警(包括最低安全高度告警MSAW、短期冲突告警STCA 等);处理范围为2600×3000NM,处理系统航迹最大值为1500个。 RDP服务器完成如下功能:(1)负责根据就近雷达覆盖组合计算和提供连续的航迹探测从而完成多雷达航速处理的目的,使用多雷达重叠覆盖的方法确定并显示出航空器在空域中最接近实际目标的位置;(2)负责处理使用特定条件产生的单雷达航迹以显示系统航速,
图2雷达预相关窗口
作者简介:毛艳华(1973一),女,湖南常德人,工程师,本科,毕业于北京机械工业学院,研究方向:空管自动化。万方数据
上一章:熔盐炉脉冲袋式收尘器的PLC控制系统应用
下一章:PLC自动控制系统可靠性分析