����ǰ��λ�ã���ҳ>��������>����˫Ŀ����������㷨
����˫Ŀ����������㷨
���ݼ��
 150
150��������ϵͳ(Transducer and Microsystem Technologies��
2018���37����10��
DOI:10.13873/J.1000-9787(2018 )10015003
����˫�Ե�����ѡ���㷨
����������
������������ѧ��������ѧԺ���㶫����510640��
ժҪ����Ի���˫Ŀ��������ά��ԭ������δ����������ݣ�����ƥ��ֲڵ����⣬�����һ��ѡ���㷨��ÿһ������������ijһ�����ͼƬ�������ػҶ�ֵ����·ͶӰ��ǰһ�λָ�����άģ���ϣ��ٽ�ģ���ϵĻҶ�ֵͶӰ����һ�������ƽ�棬���ݵ�ǰͶӰ�������һ���ԭ�н���ĶԱȣ�������άģ�͡��������������㷨��������ά��ԭ�ľ���
�ؼ��ʣ�˫Ŀ�����棻ƥ��ֲڣ�ͶӰ���ʹ�����������
��ͼ����ţ�TP391
���ױ�ʶ�룺A
���±�ţ�1000-9787(2018)10-0150-03
Iterative algorithmbasedonhoropter
LI Xi, XU Xiao
(School of Physics and Optoelectronics,South China University of TechnologyGuangzhou 510640,China�� Abstract: Aiming at problem that 3D reconstruction method based on horopter doesnt make full use of data which results in rough matching, an iterative algorithm is proposed. On each step of the algorithm,the gray value of each pixel in the picture of one camera is projected on the 3D model reconstructed on the previous step according the light path of the camera,then the gray values on the model are projected to the image plane of another camera, and the projecting data is compared with that of the original picture of the other camera, the 3D model is adjusted at
last. The result shows that the algorithm improves the precision of 3D reconstruction. Keywords : horopter; matching rough; projection; iterative; convergence condition
0����
���Ľ����˻���˫Ŀ�����棨horopter������ά�ؽ�[1.2]��������˫Ŀ����������ۣ���չVieth-MullerԲ����ά�ռ䣬�õ�horopter��3.4������horopter���ϵĽǶ�Լ���Լ��Ҷ�����Խ���ƥ�䡣ͬʱ���ṹ���˫Ŀ���������ϣ��ɴﵽ��߸�ԭ���ȵ�Ŀ�ġ����������������ʱ���ڵ������ߡ�������Ӱ��õ�������ͼ��������Ʋ����ԣ���Ӧƥ���Ҷ�Ҳ���ڲ��죬����ƥ���������ˣ��������õ����㷨5�������ƥ�䣬���ڵõ����õĽ����
��ҽѧCT����Ϊ�˻�öϲ�ͼ�����ݣ�ѧ����������ڶ�ͼ���ؽ����ʹ��㷨����������ͶӰ�ߴ��ڵĶ��ζԳƽṹ������ͼ���ؽ��ĶԳƿ�ѡ���㷨[9]��ѡ���ؽ���ͶӰ������㷨[10)�������ʹ��ؽ��㷨��ART)11]���ӻ��ַ��̽Ƕ������ͼ���ؽ��ʹ��㷨��������FBPR�㷨����ͶӰ�㷨��Richardson�㷨��ϣ�ͨ�������͵��������ﵽͼ���ؽ���Ŀ��[12]��ͨ���ο�����ͼ���ؽ����ʹ�˼�룬������������Ұ���ڵ������ش���������ͼ�����Ʋ�������ɵ�ƥ����ڵļ��⣬���������һ�ֻ���˫Ŀ�������ʹ��㷨��������ƥ��õ�����ά��ԭ���壬ͶӰ
�ո����ڣ�2018-07-27
����������õ���ͶӰͼ����ԭʼͼ�����У����У�����ͼ����Ϊ��ά�ؽ���ԭʼͼ�����ε�����ʵ��������
���㷨������Ч������ά��ԭ����� 1˫Ŀ��ά�ؽ�ϵͳ
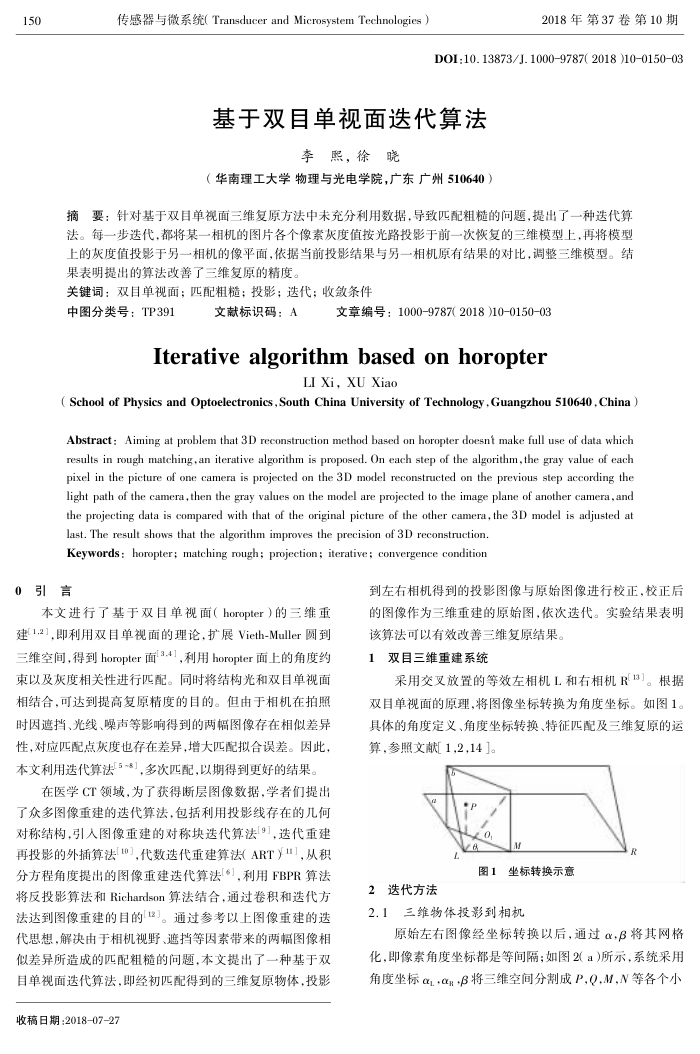
���ý�����õĵ�Ч�����L�������R13]������˫Ŀ�������ԭ������ͼ������ת��Ϊ�Ƕ����ꡣ��ͼ1������ĽǶȶ��塢�Ƕ�����ת��������ƥ�估��ά��ԭ�����㣬��������[1,2,14]��
ͼ1����ת��ʾ��
2ѡ������
2.1��ά����ͶӰ�����
ԭʼ����ͼ������ת���Ժ�ͨ����,�½������������ؽǶ����궼�ǵȼ������ͼ2(a)��ʾ��ϵͳ���ýǶ������i+��R-�½���ά�ռ�ָ��P,Q.M,N�ȸ���С