您当前的位置:首页>论文资料>管道机器人的驱动单元工艺优化设计
内容简介
 第32卷第11期 2015年11月
第32卷第11期 2015年11月吉林化工学院学报
JOURNAL OF JILIN INSTITTUTE OF CHEMICAL TECHNOLOGY
文章编号:1007-2853(2015)11-0045-05
管道机器人的驱动单元工艺优化设计
王月,钟梓楠*,吕金贺2
(1.北华大学机械工程学院,吉林吉林132013;2.北华大学汽车与建筑工程学院,吉林吉林132013)
Vol. 32 No. 11 Nov.2015
摘要:驱动单元的驱动特性和可靠性决定管道机器人的工作效率及其工作能力,由于对管道机器人三轴差速驱动单元的优化大部分都由电脑仿真来完成,但是在制造、装配阶段还是会导致差速不准、功率过大等问题.因此本文通过对三轴差速器工艺的优化,解决了工艺当中的公差分配向题,降低了零件的
工艺难度,建立了十字轴垂直度误差对啮合质量和轴向调正间隙的函数关系。关键词:管道机器人;三轴差速器;传动精度;工艺优化
中图分类号:TP24
文献标志码:B
DOl:10.16039/j. cnki. cn22 1249.2015.11.012
管道机器人用于工作在管道内部特定的空间
里的智能装备,用来完成管内加工、异物清除、防腐涂层的涂敷、管道缺陷检测等任务,从管道机器人出现至今,已经有多项研究成果14].而在众多研究中,为了保证机器人能够长距离巡线,对管道机器人提出了如下性能要求:1环境适应性好:(2 驱动效率高;③结构紧凌,功率体积比大;④移动速度快;③系统运行可靠性高
在前期研究过程中,通过对三轴差速驱动单元的仿真分析可知,只要所设计的驱动单元结构对称就可以保证实现差速功能,但是电于设计、制造和装配调整不当,还是可能会出现差速不准和功率消耗过大等故障.本文将从工艺优化的角度出发,以提高传动精度为目标,对典型零件和结构进行工艺优化分析,解决了工艺当中的公差分配问题,降低了零件的工艺难度,建立了十字轴垂直度误差对啮合质量和轴向调正间隙的函数关系[5-6]
FaLNu
BOZEA
a2EA2272228
三指花建毒主热速器!外动器
主需球著2 精科福车
文自花花妞医轮
1三轴差动式驱动单元的结构与机
构原理
管道机器人三轴差动式驱动单元由驱动部分
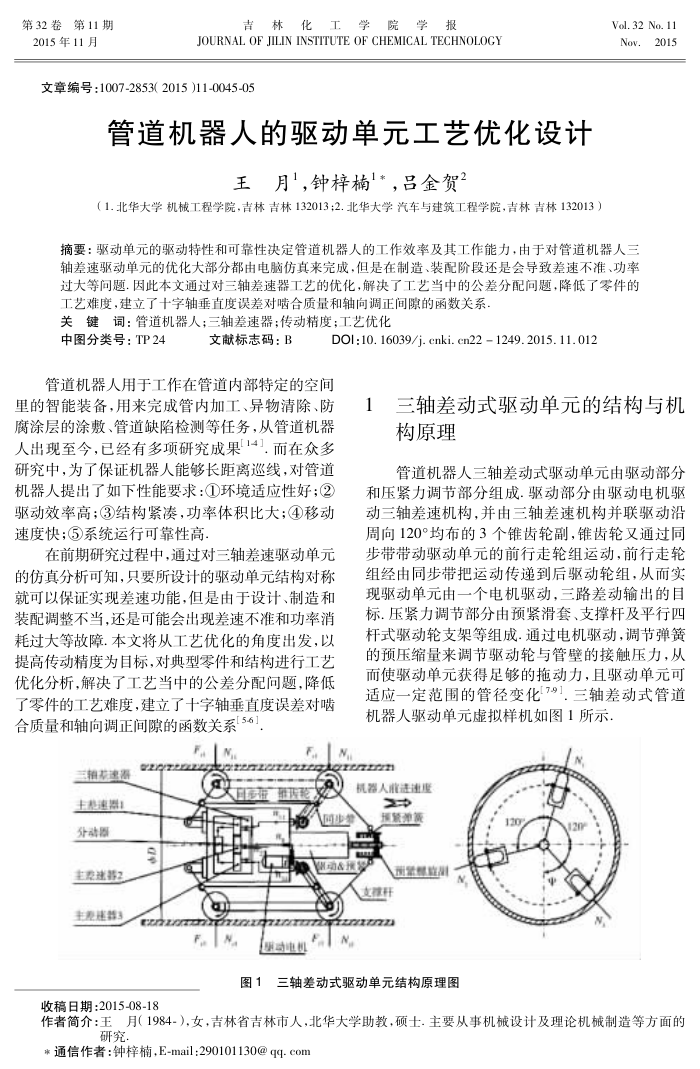
和压紧力调节部分组成:驱动部分由驱动电机驱动三轴差速机构,并由三轴差速机构并联驱动沿周向120°均布的3个锥齿轮副,锥齿轮又通过同步带带动驱动单元的前行走轮组运动,前行走轮组经由同步带把运动传递到后驱动轮组,从而实现驱动单元由一个电机驱动,三路差动输出的目标.压紧力调节部分由预紧滑套、支撑杆及平行四杆式驱动轮支架等组成.通过电机驱动,调节弹簧的预压缩量来调节驱动轮与管壁的接触压力,从而使驱动单元获得足够的拖动力,且驱动单元可适应一定范围的管径变化[791.三轴差动式管道机器人驱动单元虚拟样机如图1所示。
N
RIR
机器人能进注量
国少温动&预摄
提能单高
格光
人支徽
F,N.
动电视
FN
图1三轴差动式驱动单元结构原理图
收稿日期:2015-08-18
作者简介:王月(1984-),女,吉林省吉林市人,北华大学助教,硕士.主要从事机械设计及理论机械制造等方面的
研究
*通信作者:钟梓楠,E-mail:290101130@qq.com
上一章:压力容器腐蚀的影响与预防措施
下一章:干熄焦排焦温度异常的原因及处理