基于多窗口激光点云交互可视化系统的设计与实现
内容简介
 ・ 82
・ 82 科技论坛
基于多窗口激光点云交互可视化系统的设计与实现
张建广1黄明1郭胜利”
(1、北京建筑大学测绘与城市空间信息学院代表性建筑与古建数据库教育部工程中心,北京100044
2、北京市水利规划设计研究院,北京100048)
摘要:近年来三维激光扫描技术的工程应用日益广证,但激光点云的海量数据特征和数据处理的复杂性,乎致激光点云数据后处理技术严重缓慢,在一定程度上限制了三维激光扫描技术的发展。针对这一现状,本文提出了基于多富口的三维激光点云交互可视化系统架构设计与实现。首先进行系统的总体设计,以大数据引擎与三维交互可视化作为系统的核心,构建强大的后台数据库用于大数据存取的工作。在此架构上设计具有多富口,且能加载大影像数据,具备点云分制、数据交换、点云配准等多功能的交互可视化系统。
关键词:激光点云;多富口;数据处理;三维交互可视化 1概述
三维激光扫描技术于20世纪90年代逐渐发展起来,将此技术
应用于测量可以获取海量的三维点云数据,并广泛应用于三维重建、工业精密测量、古建筑数字化等领域。随着计算机技术的发展,三维激光扫描系统的硬件发展越来越成熟,但是目前国内相应的点云数据后处理技术研究还处于起步阶段
目前,国内的点云数据处理软件主要使用Raindropp公司的Ge-omagic Studies、Leica公司的Cyclone等。这些软件的价格昂贵,集成程度较低、多采用单窗口或多视口方式处理点云数据,且不能加载大影像数据,海量的数据管理只能采用文件的方式进行存储。因此,研究多窗口集成的三维激光点云的交互可视化系统非常必要。
2系统的总体设计
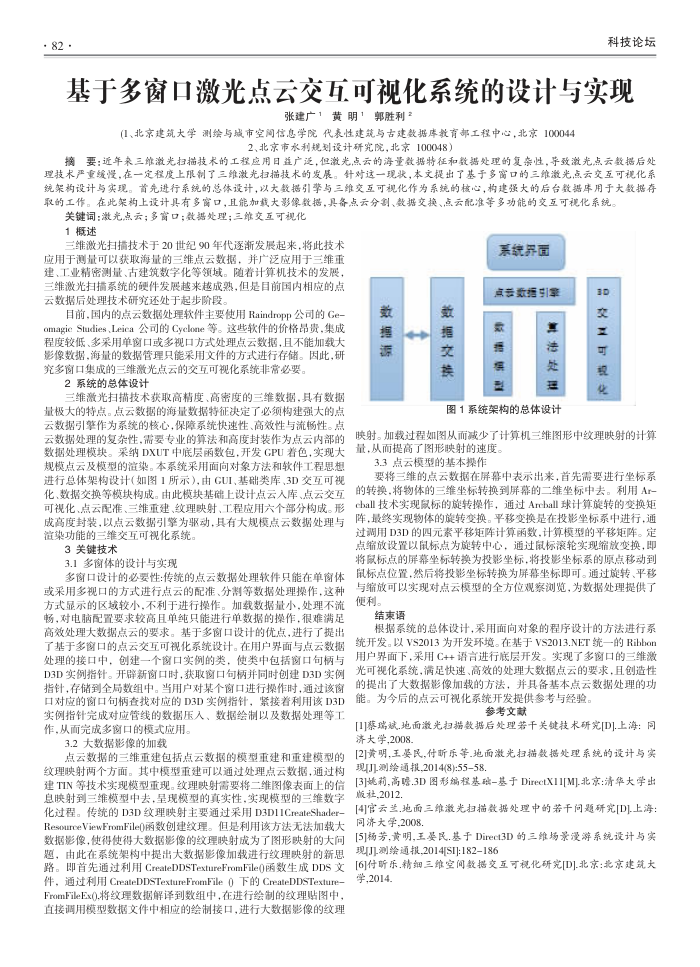
三维激光扫描技术获取高精度、高密度的三维数据,具有数据量极大的特点。点云数据的海量数据特征决定了必须构建强大的点云数据引掌作为系统的核心,保障系统快速性、高效性与流畅性。点云数据处理的复杂性,需要专业的算法和高度封装作为点云内部的数据处理模块。采纳DXUT中底层函数包,开发GPU着色,实现大规模点云及模型的谊染。本系统采用面向对象方法和软件工程思想进行总体架构设计(如图1所示),由GUI、基础类库,3D交互可视化、数据交换等模块构成。由此模块基础上设计点云入库、点云交互可视化、点云配准、三维重建、纹理映射、工程应用六个部分构成。形成高度封装,以点云数据引擎为驱动,具有大规模点云数据处理与演染功能的三维交互可视化系统。
3关键技术
3.1多窗体的设计与实现
多窗口设计的必要性:传统的点云数据处理软件只能在单窗体或采用多视口的方式进行点云的配准、分制等数据处理操作,这种方式显示的区域较小,不利于进行操作。加载数据量小,处理不流畅,对电脑配置要求较高且单纯只能进行单数据的操作,很难满足高效处理大数据点云的要求。基于多窗口设计的优点,进行了提出了基于多窗口的点云交互可视化系统设计。在用户界面与点云数损处理的接口中,创建一个窗口实例的类,使类中包括窗口句柄与 D3D实例指针。开降新窗口时,获取窗口句柄并同时创建D3D实例指针,存储到全局数组中。当用户对某个窗口进行操作时,通过该图口对应的窗口句柄查找对应的D3D实例指针,紧接着利用该D3D 实例指针完成对应管线的数据压入、数据绘制以及数据处理等工作,从而完成多窗口的模式应用。
3.2大数据影像的加载
点云数据的三维重建包括点云数据的模型重建和重建模型的纹理映射两个方面。其中模型重建可以通过处理点云数据,通过构建TIN等技术实现模型重现。纹理映射需要将二维图像表面上的信息映射到三维模型中去,呈现模型的真实性,实现模型的三维数字化过程。传统的D3D纹理映射主要通过采用D3D11CreateShader-ResourceViewFromFile)函数创建纹理。但是利用该方法无法加载大数据影像,使得使得大数据影像的纹理映射成为了图形映射的大间题,由此在系统架构中提出大数据影像加载进行纹理映射的新思路。即首先通过利用CreateDDSTextureFromFile0函数生成DDS文件,通过利用 CreateDDSTextureFromFile 0下的 CrealeDDSTexture-FromFileEx0.将纹理数据解译到数组中,在进行绘制的纹理贴图中,直接调用模型数据文件中相应的绘制接口,进行大数据影像的纹理
数搏源
敏推文族
票统界面
点多
福理
法处
图1系统架构的总体设计
BD 交工可
化
映射。加载过程如图从而减少了计算机三维图形中纹理映射的计算量,从而提高了图形映射的速度
3.3点云模型的基本操作
要将三维的点云数据在屏幕中表示出来,首先需要进行坐标系的转换,将物体的三维尘标转换到屏幕的二维坐标中去。利用Ar-cball技术实现鼠标的旋转操作,通过Areball球计算旋转的变换矩阵,最终实现物体的旋转变换。平移变换是在投影坐标系中进行,通过调用D3D的四元素平移矩阵计算函数,计算模型的平移矩阵。定点缩放设置以鼠标点为旋转中心,通过鼠标滚轮实现缩放变换,即将鼠标点的屏幕坐标转换为投影坐标,将投影坐标系的原点移动到鼠标点位置,然后将投影坐标转换为屏幕坐标即可。通过旋转、平移与缩放可以实现对点云模型的全方位观察浏览,为数据处理提供了便利。
结束语
根据系统的总体设计,采用面向对象的程序设计的方法进行系统开发。以VS2013为开发环境。在基于VS2013.NET统一的Ribbon 用户界面下,采用C++语言进行底层开发。实现了多窗口的三维激光可视化系统,满足快速、高效的处理大数据点云的要求,且创造性的提出了大数据影像加载的方法,并其备基本点云数据处理的功能。为今后的点云可视化系统开发提供参考与经验。
参考文献
[1]蔡瑞斌.地面激光担描数据后处理若干关键技术研究[D].上海:同济大学,2008
[2]黄明,主要民,付断乐等.地面激光扫描数据处理系统的设计与实现[J]测绘通报,2014(8):5558
[3]姚莉,高瞻.3D图形编程基础-基于DirectX1I[M]北京:清华大学出版社,2012
[4]官云兰.地面三维激光扫描数据处理中的若干问间题研究[D]上海:同济大学,2008
[5]杨芳,黄明,王要民.基于Dinect3D的三维场录漫游系统设计与实
现[J],测绘通报,2014[SI]:182-186 学,2014
上一章:灯具产品国家标准检测常见问题分析
下一章:基于大班教学的大学物理有效教学方法探索