您当前的位置:首页>论文资料>激光点云数据在三维建模技术的应用研究
内容简介
 ・102・
・102・激光点云数据在三维建模技术的应用研究
邹娟茹
(杨凌职业技术学院,陕西杨凌712100)
科技论坛
摘要:利用激光点云数据构建实体三维儿何模型过程包括数据预处理和模型重建。本文提出的方法能够很好的为快建三维建模进行报务,光其是比较关注道露两侧信息的三维获取,这将大大减少人工三维数据获取及其建模的工作量。
关键词:激光;点云数据;三诊建模:模型重建
Abstract: Using a laser point cloud data to construct the entity 3 D geometric model process including data preprocessing and mod-el reconstruction. The proposed method can very good service for rapid 3 d modeling, especially more focus on the road on both sides of the 3 d acquisition of infomation, this will greatly reduce the manual 3 d data acquisition and modeling work.
Key words:Laser; Point cloud data ;3D modeling; Model reconstruction
传统的三维建模是基于图片信息的场景建模和表现,这种技术存在着缺少真实感,三维几何信息不准确以及处理速度缓慢的缺点。利用激光扫描技术进行三维重建能够有效恢复出具有准确几何信息和照片真实感的三维模型。整个点云数据建模过程包括数据预处理和模型重建。
1数据预处理
1.1数据全自动预处理方法
针对激光点云数据的特性,将数据预处理方法分为两类,半自动的数据预处理方法和全自动的数据预处理方法。半自动的方法主要是利用现有的各种类型的点云数据处理软件,这些软件中往往具有通用的处理功能,但对于特定的数据处理效果有一定的不足,在功能和性能上也存在一定缺陷。全自动的数据预处理方法主要是通过一定的算法来实现点云数据预处理,包括点云数据滤波,点云数据分类等。数据滤波的目的是为了去除测量噪声,别除掉含有相差的相关观测数据和无效形体数据,从面而得到目标物体形体信息的最佳估值。
激光点云数据在三维空间的分布形态呈现随机离散性。一股点云数据经过去滤波处理后可以分成两大类,一类是地面上的点,-类是非地面上的点。本文主要介绍数据滤波分类方法,通过此方法实现地面点与非地面点的分类。
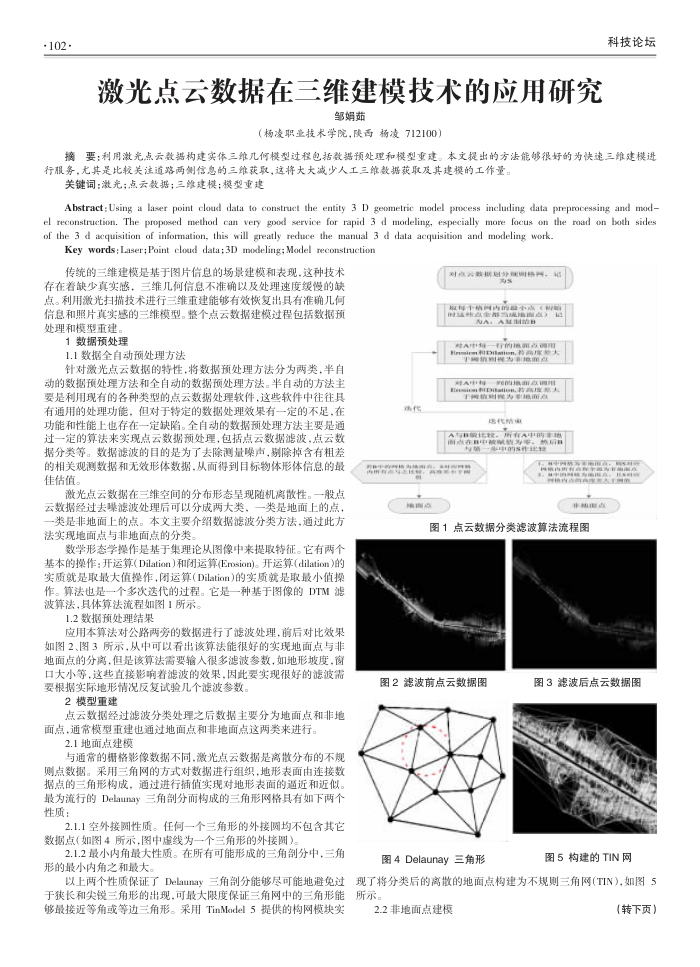
数学形态学操作是基于集理论从图像中来提取特征。它有两个基本的操作:开运算(Dilation)和闭运算(Emsion)。开运算(dilation)的实质就是取最大值操作,闭运算(Dilation)的实质就是取最小值操作。算法也是一个多次送代的过程。它是一种基于图像的DTM滤波算法,具体算法流程如图1所示。
1.2数据预处理结果
应用本算法对公路两旁的数据进行了滤波处理,前后对比效果如图2、图3所示,从中可以看出该算法能很好的实现地面点与非地面点的分离,但是该算法需要输人很多滤波参数,如地形坡度,窗口大小等,这些直接影响着滤波的效果,固此要实现很好的滤波需要根据实际地形情况反复试验几个滤波参数。
2模型重建
点云数据经过滤波分类处理之后数据主要分为地面点和非地面点,通常模型重建也通过地面点和非地面点这两类来进行。
2.1地面点建模
与通常的栅格影像数据不同,激光点云数据是离散分布的不规则点数据。采用三角网的方式对数据进行组织,地形表面由连接数据点的三角形构成,通过进行插值实现对地形表面的逼近和近似。最为流行的Delaunay三角剖分而构成的三角形网格具有如下两个性质:
2.1.1空外接圆性质。任何一个三角形的外接圆均不包含其它数据点(如图4所示,图中虚线为一个三角形的外接围)。
2.1.2最小内角最大性质。在所有可能形成的三角剖分中,三角形的最小内角之和最大。
以上两个性质保证了Delaunay三角剖分能够尽可能地避免过于狭长和尖锐三角形的出现,可最大限度保证三角网中的三角形能够最接近等角或等边三角形。采用TinModel5提供的构网模块实
代
对点2数联分期格声,站最得平精间的品小
AAAMMB
A中
品m用
Pnmwaema A 中国的能为通店
选代结惠
人有蒙托我,所有人中的事地
电的%件批验
A
NmNEEAE
m点
非热点
图1点云数据分类滤波算法流程图
图2滤波前点云数据图图4Delaunay三角形
图3滤波后点云数据图图5构建的TIN网
现了将分类后的离散的地面点构建为不规则三角网(TIN),如图5 所示。
2.2非地面点建模
(转下页)
上一章:辽宁省服务贸易的现状与发展探究
下一章:浅谈烹饪实习教学中的分层教学法