您当前的位置:首页>论文资料>模糊控制算法应用于EPS系统的研究
内容简介
 科技论坛
科技论坛模糊控制算法应用于EPS系统的研究
宋海兵
(江苏罡阳股份有服公司,江苏泰州225318)
・127-
要:本文采用模糊控制算法计算任意车建下,驾驶页对方向盘施加一定的担矩,电动助力转向系统电机提供的助力电流。同时,摘
采用模棚自造应PID控制算法对PID参数进行在线自整定,使控制器具有良好的自适应性。使用Matlab软件对助力转向控制系统进行仿真,模糊控制下的输出电流为初始电流。和始电流、传统PID控制输出电流、模棚自适应PID控制输出电流,三者进行对比和分析,结果表明运用模棚控制的EPS系统助力电机电流策略能够得到合适的助力电流,模棚自适应PID控制算法的应用,减少了响应时间和系统误差,为模期控制算法全面应用于EPS系统提供理论基础。
关键词:电动助力转向:模潮控制;模期自适应PID控制;响应时间;系统误差
Abstract: In this paper, a fuzzy control algorithm is used to calculate the electric power supply of the steering wheel to the steering wheel. At the same time, the fuzzy adaptive PID control algorithm is used to adjust the PID parameters online, so that the controller has good adaptability. Using the Matlab software to simulate the power steering control system, the output current of the fuzzy control is the initial curent. The initial current, the traditional PID control output current, fuzzy adaptive PID control output current, and the three are compared and analyzed. The results show that the application of fuzzy adaptive PID control algorithm can be applied to the EPS system.
Key words:Electric power steering; Fuzzy control ;Fuzzy adaptive PID control; Response time; Systematic error
电动助力转向系统(ElectriePower Steering,EPS)是应用于汽车转向控制中最为常见的系统,其转向特性和操作稳定性较好,结构紧凌且简单,由于不需要液压装置,所以不存在漏油的间题,提供效率的同时也能够保证资源的节约、环保性能的实现,因此,EPS系统的开发成为汽车转向行业的研究热点之
EPS系统的助力特性曲线,是指电机的助力电流与方向盘输入转矩、车辆行驶速度、轮胎气压等参数之间的关系,一般情况下,方向盘输人转矩为第一要素,车辆行驶速度为第二要素,在现阶段研究中,考虑第一和第二要素,即可满足控制要求。EPS的助力特性曲线和助力控制策略是EPS软件系统的两大关键技术。本文针对汽车低速行驶时转向轻便、高速行驶时转向稳定的特点,基于模棚控制策略对助力特性曲线进行设计,同时将模糊控制与PID控制结合,利用模棚推理方法,实现对PID参数的在线整定,使控制器具有良
表1电机电流1的模棚规则表
82
ZB ZN zs 20 PS PM PB
E 28 2M 2 20
M 用
28
ZB ZB 82 ZB ZB 82 ZB
B2BD6 图2BDS PMZMZ0 PSZM20 PS20FB 20-20FB
2
M ZN ZN M 28 28 28 28
s 2 2 ZM Kz ZM 8 ZB
20 20 20 zs zs M ZN 28
PS PS PS 20 20 zs ZM ZM
表2K,、K、K,的模糊规则表
EC
20
PBZBIS PBZBZS PMZM2S S2520 2.o2.c2 Z0 2D M
PMZMZB
PMZMZB
PMZMZB
PS 2S 2M
PS252S 20 2020 ZS PSPS ZMIS PM
Szo2.o2 2520 S1S 2MPMPM
PS
PS2SZB 202025 2S D620 25 S 20 2MPMPS 2MPMPS
PN
PM
PM PM PS PS 20 2S ZM
202D-2M 2S.D625 SZ zz 2MBS Sa a
PB PM PM PS PS 20 2S
S0-z(2 25 1520 2NPB20 2NB20 asaz
好的自适应性。
4
V=0
KA)
VV
T(a)
n NA)
T
TaTamn
Iao(b) 4
(A)
T(c)
T(N・m) Va0 y-Va T(N・m)
V=0 V=Vaes
Ta
T(N・m)
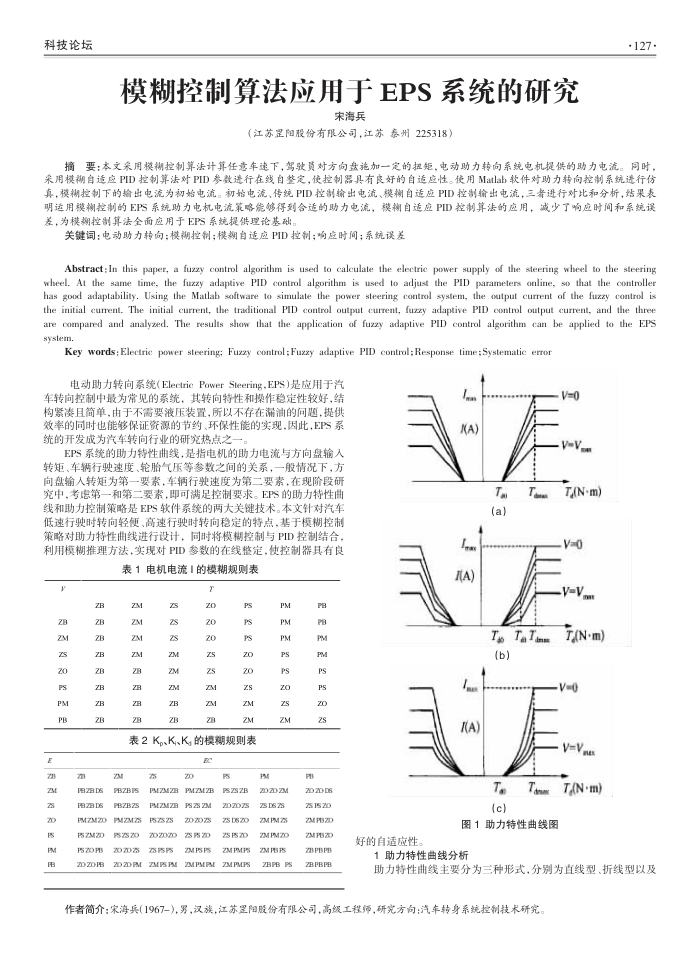
图1助力特性曲线图
助力特性曲线分析 1
助力特性曲线主要分为三种形式,分别为直线型、折线型以及
作者简介:宋海兵(1967-),男,汉族,江苏里阳股份有限公司,高级工程师,研究方向:汽车转身系统控制技术研究,
上一章:高职基础化学实训实施“项目化教学”的实践与探索
下一章:橘皮活性炭的制备及着色