基于Clipper数控伺服系统的限位与回零研究
内容简介
 第12期 2017年12月
第12期 2017年12月组合机床与自动化加工技术
Modular Machine Tool & Automatic Manufacturing Technique
文章编号:10012265(2017)12010604
D0I:10.13462/j.cnki.mmtamt.2017.12.026
No.12 Dec.2017
基于Clipper数控伺服系统的限位与回零研究
杨峰,董颖怀,李振亮,薛威,宋菲菲(天津科技大学机械工程学院,天津300222)
摘要:对基于Clipper数控伺服系统的构成和控制方式进行阐述,采用速度模式连接,进行全闭环控制。并对限位和回零进行研究,提出软限位与硬限位结合的双重限位方式,回零开关和索引通道的逻辑组合作为双触发回零条件。在下位机软件窗口发送在线指令、编写运动程序或PLC程序进行移动,观察电机状态位判断各轴限位和回零功能是否完成,采集回零搜索的实时数据检验回零轨迹。
系统根据该限位和回零方式,实现了超程保护和精确回零,为高精度位置控制提供了基础。关键词:Clipper;数控伺服系统;全闭环控制;双重限位;双触发回零
中图分类号:TH166;TG659
文献标识码:A
Research on Limit and Home of Clipper CNC Servo System YANG Feng,DONG Ying-huai, LI Zhen-liang,XUE Wei, SONG Fei-fei
( School of Mechanical Engineering, Tianjin University of Science&Technology, Tianjin 300222, China)
Abstract : Structure and control mode of the CNC Servo System based on Clipper was expounded ,the fully closed-loop control is carried out by using the speed mode connection. Have a research on the limit and home, the soft limit and hard limit combination of the doubl-limit mode was proposed,the logical combina tion of homing switch and the index channel as a double-trigger homing condition. Sending online instruc-tions,writing motion program or PLC program in the slave computer software window for motor move, ob-serve the motor status bit to determine the axis limit and homing function was completed,collecting homing search real-time data test homing trajectory. The system has overrun protection and accurate homing accord-ing to the limit and home mode, which provides the basis for high precision position control.
Key words : Clipper;CNC Servo System; fully closed-loop control;double-limit; double-tigger homing
0引言
Clipper(运动控制器)是PMAC(Programmable Multi-AxisController)系列中Turbo产品,提供4轴伺服控制以及32个通用数字I/0点,是具备结构紧凑和超高性价比优点的多轴控制器。IPC(工业控制计算机)因其质量好、实时性高、控制性强等特点,被广泛应用于工业现场。因此本系统选择Clipper+IPC 双CPU控制结构,具有开放性、集成性和精密性等优点。
国内众多高校及科研机构研制的运动控制器+ PC型开放式数控系统,为实现位置反馈大多采用闭环控制[2-3]。由于本系统的驱动器为速度控制模式,因此将光栅尺的位置反馈到Clipper,实现全闭环位置反馈,增加系统的定位精度。
在数控机床中,设置限位保护工作运行安全,高精度定位平台普追采用软硬限位结合方式4],本系统也采用双限位设置。回零确定坐标轴的零点,目前大多
收稿日期:2017-03-15
数增量式位置检测数控机床采用挡块式回零[3」,由于是接触式回零,不是非常精确和可重复的。在此基础上提出回零开关和索引通道组合的双触发回零方式,实现精确回零。
1
数控伺服系统概述
1.1数控伺服系统结构
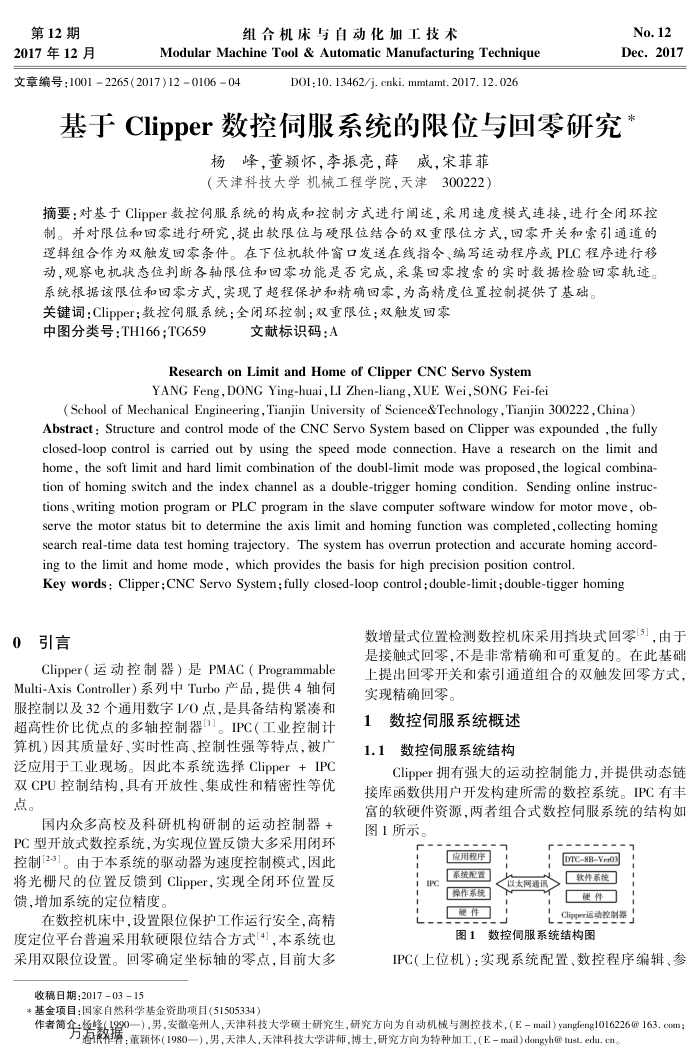
Clipper拥有强大的运动控制能力,并提供动态链接库函数供用户开发构建所需的数控系统。IPC有丰富的软硬件资源,两者组合式数控伺服系统的结构如图1所示。
应用程序
DTC8BVer03
系统配置操作系统硬件
以太网通讯
软件系貌碰件 dd
图1数控伺服系统结构图
IPC(上位机):实现系统配置、数控程序编辑、参
*基金项目:国家自然科学基金资助项目(51505334)
作者简众:督疆90―),男,安微毫州人,天津科技大学硕士研究生,研究方向为自动机械与测控技术,(E-mail)yangfeng1016226@163.com:
万态塔:董颖怀(1980―),男,天津人,天津科技大学讲师,博士,研究方向为特种加工,(E-mail)dongyh@tust.edu.cn。
上一章:基于RCS库实现跨平台远程通信
下一章:基于有限元分析的微型磨料流机床研究