可控RRRPP型机构的可动性与轨迹图谱研究
内容简介
 第4期 2017年4月
第4期 2017年4月组合机床与自动化加工技术
Modular Machine Tool &Automatic Manufacturing Technique
文章编号:10012265(2017)04001404
DOI : 10. 13462/j. cnki. mmtamt. 2017. 04. 004
No.4 Apr.2017
可控RRRPP型机构的可动性与轨迹图谱研究
宋胜涛,赵建文,马瑶,金航旭
(中北大学机械与动力工程学院,太原030051)
摘要:文章以RRR型和PPR型二级杆组为基本杆组所组成的RRRPP构型为研究对象,首先,在选定原动件以及运动类型的前提下,分析了机构的可达工作空间以及奇异位形,得到了该机构的可动性边界条件:其次,在此基础上,研究了机构在不同可控固素下末端输出点的轨迹图谱;最后,研究了快速绘制机构的灵活工作空间的方法。研究结采为工程设计者在给定的工作轨迹设计机构时提供了有价值的参考。
关键词:RRRPP型机构;工作空间;奇异位形;可动性;轨逆图谱
中图分类号:TH112;TG506
文献标识码:A
Research on Mobility and Trajectory Atlas of Controlled RRRPP Mechanism
SONG Sheng-tao,ZHAO Jian-wen, MA Yao,JIN Hang-xu
( School of Mechanical and Power Engineering , North University of China, Taiyuan 030051 , China)
Abstract: This paper uses the RRRPP configuration formed by the basic lever RRR and PPR assur group grade II as the research object, firstly, on the basis of the driving link and its motion type was selected, the reachable workspace and singular configuration of mechanism was analyzed, the mobility boundary condi-tions of mechanism was obtained; Then, based on which, the trajectory atlas of the end-effector of mecha-nism under different controllable factors was analyzed; Finally, the method of rapid-drawing the flexible workspace of the mechanism was analyzed. The results provides a valuable reference for the engineering de-signers to design mechanism with specific work trajectory.
Key words: RRRPP mechanism; workspace ; the singular configuration ;mobility ; the trajectory atlas
0引言
两自由度平面五杆机构是最简单的机器人机构,而任何一种机构都有可能成为组成机器人的重要组成部分,诸如五杆机构的打结器"、油菜钵苗移栽机2} 下肢康复训练机构和动臂-斗杆机构4等现代机器中得到广泛应用。平面五杆机构的基本构型13种5] 包含转动副(R)和移动副(P)两种铰链,按照含有的转动副和移动副的数目共分为5类,分别是5R(RRRRR)、4RIP(RRRRP、RRRPR 和 RRPRR)、3R2P
RRRPP、RRPRP、RRPPR、RPRPR、PRRRP
和
PRRPR)、2R3P(RPRPP、RPPRP 和 PRPRP)。五杆机构的研究大多数集中在5R型全转动副机构上和少数的单移动副上[6],涉及可动性[7]、求解空间]和奇异性等多个方面。含两个移动副五杆机构的系统性研究目前不多,并且对于末端输出点的输出轨迹与可控性因素之间的规律研究相对薄弱
可动性作为机构尺寸综合的前提,针对RRRPP型曲柄滑块平面机构,首先从可动性条件入手,在文献[10]对称四杆机构输出曲线形状图谱的基础上,进一
收稿日期:20161208
步对五杆机构末端输出点的输出轨迹与可控性因系之间的关系图谱进行研究,找出两者之间的影响规律为 RRRPP型五杆机构的设计提供了理论依据。
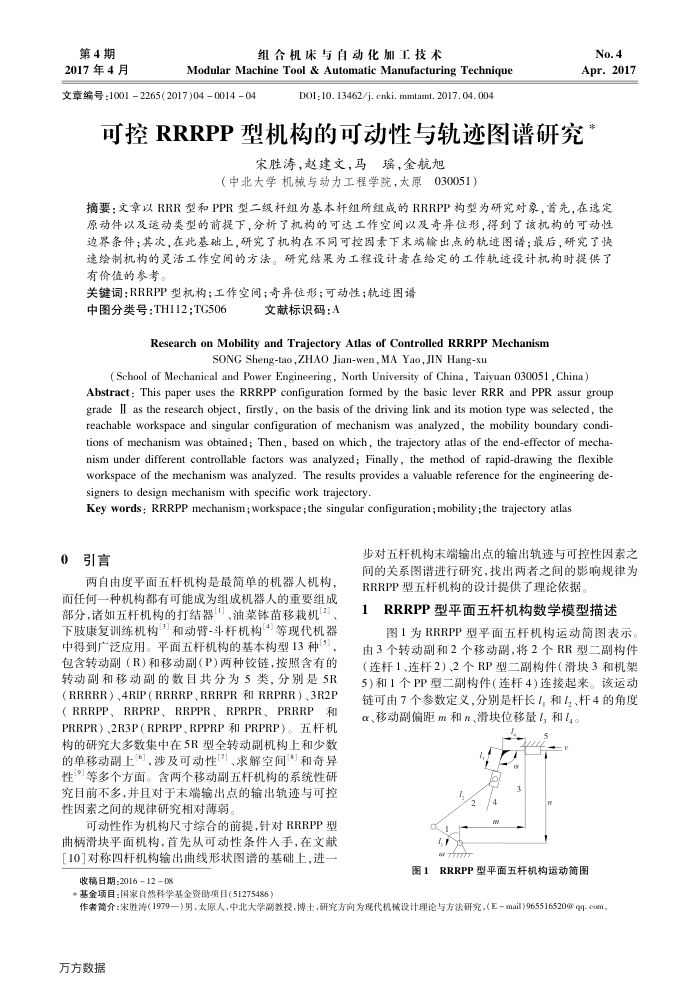
RRRPP型平面五杆机构数学模型描述图1为RRRPP型平面五杆机构运动简图表示由3个转动副和2个移动副,将2个RR型二副构件(连杆1、连杆2)、2个RP型二副构件(滑块3和机架 5)和1个PP型二副构件(连杆4)连接起来。该运动链可由7个参数定义,分别是杆长1,和,、杆4的角度 a、移动副偏距m和n、清块位移量l,和L4
图1RRRPP型平面五杆机构运动简图
*基金项目:国家自然科学基金资助项目(51275486
作者简介:宋胜涛(1979―)男,太原人,中北大学副教投,博土,研究方向为现代机械设计理论与方法研究,(E-mail)965516520@q-com 万方数据