您当前的位置:首页>论文资料>用于核环境管道维修的宏-微机器人遥控焊接
内容简介
 第33卷第1期 2012年1月
第33卷第1期 2012年1月焊接学报
TRANSACTIONSOFTHECHINAWELDINGINSTITUTION
Vol.33 January
用于核环境管道维修的宏一微机器人遥控焊接
杜爱国,李海超,陈洪堂,高洪明
(哈尔滨工业大学现代焊接生产技术国家重点实验室,哈尔滨150001)
捕要:针对复杂核环境的管道焊接维修,提出了一种宏一微结构的机器人遥操作方法实现遥控焊接,通过工具转换接口和气动夹紧模块完成宏机器人与微机器人的快速连接,在宏机器人与微机器人之间加人六维力觉传感器,使宏一微的机器人通操作中具有主动案顺性,设计了宏一微遥操作机器人的控制器,并重点对重力补偿、管道自适应装配策略、弧长控制等进行了研究,实现了远端环境中的管道抓取、装配以及遥控焊接,结果表明,宏一微结构的机器人遥提作遥控焊接系统能够快速完成极限环境下的管道焊接维修,焊接质量稳定可靠
关键词:遥控焊接:宏-微机器人:力觉传感;遥操作
中图分类号:TC409 0序言
文献标识码:A
文章编号:0253360X(2012)01006504
杜爱国
No.1 2012
1宏微机器人遥控焊接系统结构
核电以其清洁环保,高效节能的特点成为国内大力发展的新能源形式.核电站运行过程的维护工作中,管道裂纹检测和焊接修复是主要任务,因存在核辐射,操作者只能远离现场,进行遥控焊接,目前大部分研究是针对特定任务开发专用设备,2000 年美国能源部针对RTSA项目开发了核环境机器人遥控切割系统,2009年西班牙针对ITER项目开发了RH焊接系统[3],但其研究的开发周期长、成本高,且因机器人自由度有限、检测和定位困难、焊接质量差,难以满足实际焊接任务的需要,为解决上述问题,文中提出宏一微结构的机器人遥操作用于核环境管道快速修复的遥控焊接,开发了具有重量轻、易抓取、操作灵活特点的微机器人,可以实现对焊接路径的准确控制,另外在系统中增加了弧长调节控制器,提高了焊接质量,在宏机器人与微机器人之间加人了六维力觉传感器,构成宏一微机器人系统3,使系统具有主动柔顺性,执行管道装配任务过程中,通过微机器人重力补偿与人机共享的管道装配策略,实现了自主的管道抓取和装配,基于焊接弧长控制、工具重力补偿、管道装配策略等研究,宏一微机器人遥操作技术具有实现管道快速装配和稳定焊接质量的优点,使遥控焊接技术用于核
环境管道修复更具有工程意义和实用价值收稿日期:2010-11-26
基金项目:国家自然科学基金资助项目(50905043)万方数据
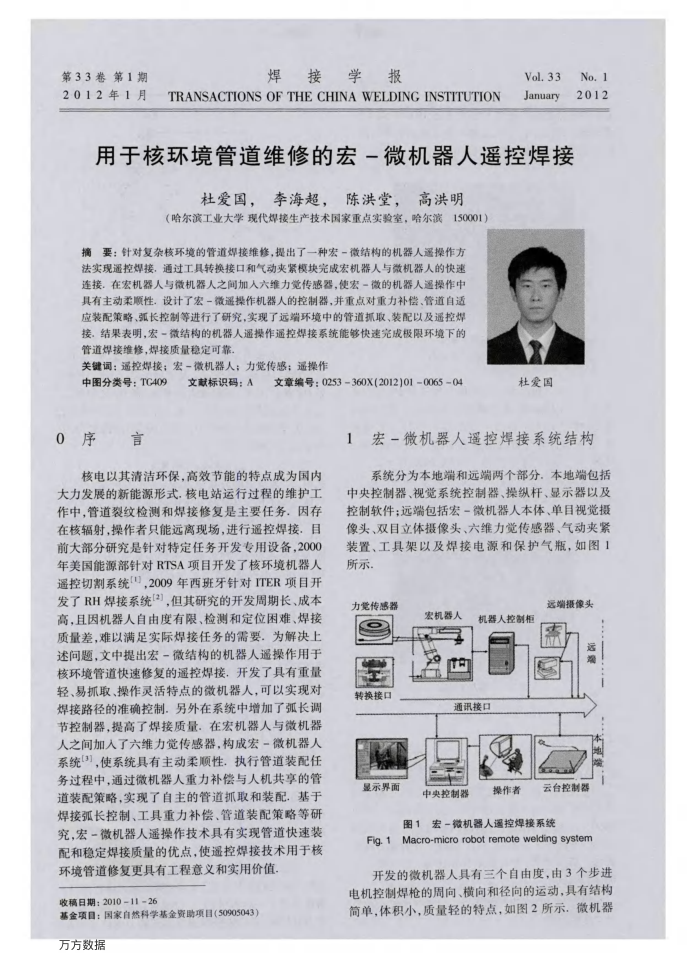
系统分为本地端和远端两个部分,本地端包括中央控制器、视觉系统控制器、操纵杆、显示器以及控制软件:远端包括宏-微机器人本体、单目视觉摄像头、双目立体摄像头、六维力觉传感器、气动夹紧装置、工具架以及焊接电源和保护气瓶,如图1 所示
力觉传感器 o
转换接口
A 显示界面
宏机器人
机器人控制柜
通讯接口
操作者
中央控制器
远端摄像头
运本网
云台控制器
图1宏-微机器人遥控焊接系统
Fig.1 Macro-micro robot remote welding system 开发的微机器人具有三个自由度,由3个步进电机控制焊枪的周向、横向和径向的运动,具有结构简单,体积小,质量轻的特点,如图2所示,微机器