����ǰ��λ�ã���ҳ>��������>ˮ�»����˾ֲ��ɷ�����ϵͳ
ˮ�»����˾ֲ��ɷ�����ϵͳ
���ݼ��
 ��38����1�� 2017��1��
��38����1�� 2017��1������ѧ��
TRANSACTIONS OF THE CHINA WELDING INSTITUTION ˮ�»����˾ֲ��ɷ�����ϵͳ������л���飬���ʲ٣�����2
Vol.38
No.1
January
2017
��1.����������ѧ��е����������ѧԺ������510640;2.����������ѧ�������ѧ����ѧԺ������510640��ժҪ����Ժ˵�վ����ˮ�º���������������һ�ֲ��ɷ�ˮ�»����˺���ϵͳ����DSC������Ϊ���ģ���϶����������·�������ȫ���ֶನ����������Ĵ���ˮ�º��ӵ�Դ�����õ����ѹ�������ơ���Ƶն���������Ƽ������ܷ⼼��������������DZˮ��˿װ�ã���Ժ��Ӿֲ��������������⣬�����˻����������ԭ����˫�����ṹ����ˮ�֣�����ר��ˮ�º�ǹ�������ˡ��Ӿ�ϵͳ�ȣ��ˮ�»����˾ֲ��ɷ���������ƽ̨����չˮ
�º������飬������������Ƶľֲ��ɷ�����ϵͳ�������ܿɿ��������ɹ��ʸߣ����ӹ����ȶ�������������۹ؼ��ʣ��ֲ��ɷ���ˮ�»����˺��ӣ�ˮ�º��ӵ�Դ������ˮ�֣�DZˮ��˿װ��
��ͼ����ţ�TG434 0����
���ױ�ʶ�룺A
���±�ţ�0253360X(2017)01000504
1ˮ�º���ϵͳ���巽�����
�˵�վ�������صij���ƻ�����Ȼ�ֺ���
����ȫ�ų��������¹ʵķ��գ��������ں˵���¹��У�Ҳ�п��ܻᷢ��ˮ�����ơ������ƿڵ��¹ʣ�����ˮ�º��ӽ������ѳ�Ϊ�˵�Ӧ��ά��һ����Ҫ��ҵ�������˵繹���ء���ˮ�ؼ�֮��ȼ��ˮ���ڷ���ǿ�������ԲӰ�����ض࣬ˮ�º��������Ѷȼ���[1]�����е�����ˮ�º��ӷ����У��ֲ��ɷ���������ˮ�ֽ�������λһС�������ˮ�ſ��Ӷ�ʵ�ֽ��Ƹɷ�����Ч�����ۺ��˸ɷ����ӵĸߺ���������ʪ�����Ӽ�����е��ŵ�(2)���dz��ʺϺ˵�ˮ�º���ά����[3]��Ϊ��ǿ�˵���¹ʼ����¹ʺ�Ӧ�����������������ʺ��ں˵�վǿ���������µ�ˮ�º��ӻ�����������ü�ޣ�
������Ժ˵�վˮ��Ӧ������ά����Ҫ����
����ȫ���ִ���ˮ�º��ӵ�Դ�������͵�DZˮ��˿װ�á�����ˮ�֡��������ϵͳ�Լ����������豸����ͨ��ϵͳ���ɣ����Ƴɹ�һ�ֲ��ɷ�ˮ�»����˺���ϵͳ������չ����Ӧ�Ĺ��յ��Ժ������о�.���Ƶľֲ��ɷ�ˮ�º���ϵͳ������ˡ��Ӿ�ϵͳЭͬ���������ݲ�ͬ�ĺ�������������ӹ켣�����Ӳ�������ʵʱ���ٺ��ӹ��̵绡��Ϊ����ʱ�����������Ի�÷���Ҫ��ĺ��죬����˵�Ӧ��ά����Ҫ.
�ո����ڣ�201605-25
������Ŀ��������Ȼ��ѧ����������Ŀ(51375173)���㶫ʡ�Ƽ��ƻ���
Ŀ(2013B011302006��2014B010104002��2014B090901030���������У��������ҵ���������Ŀ��2015ZP039��
������
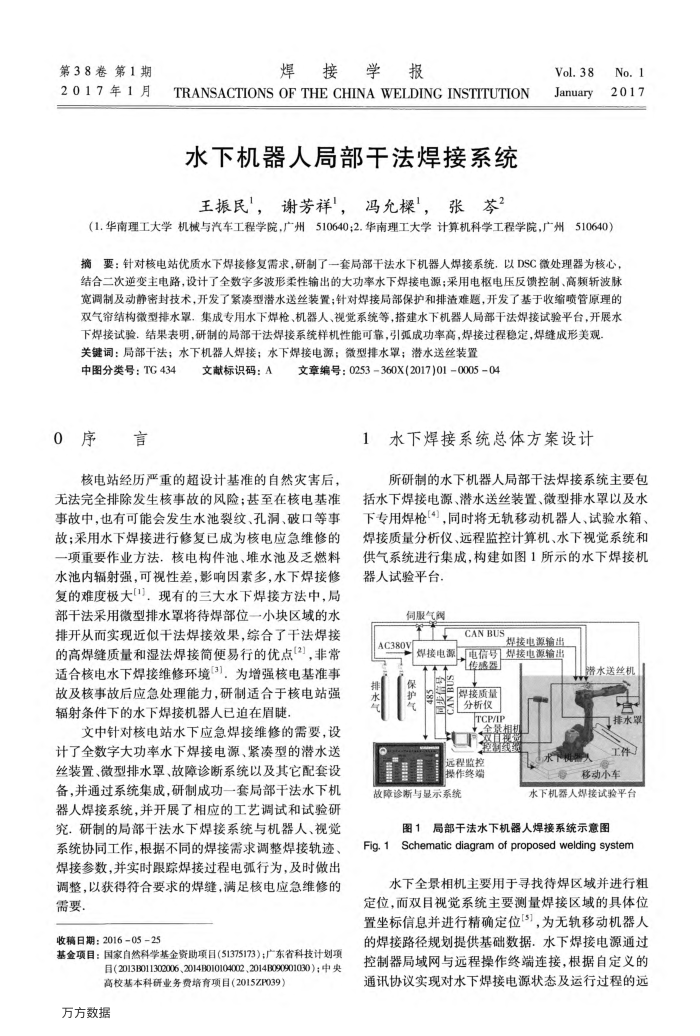
�����Ƶ�ˮ�»����˾ֲ��ɷ�����ϵͳ��Ҫ����ˮ�º��ӵ�Դ��DZˮ��˿װ�á�����ˮ���Լ�ˮ��ר�ú�ǹ4)��ͬʱ�����ƶ������ˡ�����ˮ�䡢�������������ǡ�Զ�̼�ؼ������ˮ���ӿ�ϵͳ����ϵͳ���м��ɣ�������ͼ1��ʾ��ˮ�º��ӻ���������ƽ̨��
�Ƿ�����
AC380V
CAN BUS
���ӵ�Դ���
���ӵ�Դ���źź��ӵ�Դ���
������
��ˮ��˿��
��
����
4
��������������
TCP/IP ��
Զ�̼�ز����ն�
�����������ʾϵͳ
��ˮ�^����
���ƶ�С��
ˮ�»����˺�������ƽ̨
ͼ1�ֲ��ɷ�ˮ�»����˺���ϵͳʾ��ͼ
Fig. 1Schematic diagram of proposed welding system
ˮ��ȫ�������Ҫ���ڵ��Ҵ��������дֶ�λ����˫Ŀ�Ӿ�ϵͳ��Ҫ������������ľ���λ��������Ϣ�����о�ȷ��λ[3]��Ϊ���ƶ������˵ĺ���·���滮�ṩ�������ݣ�ˮ�º��ӵ�Դͨ����������������Զ�̲����ն����ӣ������Զ����ͨѶЭ��ʵ�ֶ�ˮ�º��ӵ�Դ״̬�����й��̵�Զ
��һ�£�����Ϳ�����TGO�����仯
��һ�£�˫˿GMAW���ӵĵ绡���ź��жϷ���
�������
ˮ�¾ֲ���ʽ������ˮ�����о�
GB/T 21412.8-2010 ʯ����Ȼ����ҵ ˮ������ϵͳ����ƺͲ��� ��8���֣�ˮ������ϵͳ��ˮ�»�����(ROV)�ӿ�
GB/T 36896.2-2018 ��������ң��ˮ�»����˵�2���֡û�е����Һѹϵͳ
GB/T 36896.2-2018 ��������ң��ˮ�»����� ��2���֣���е����Һѹϵͳ
GB/T 25012-2010 ����A����������̶�ʽ�ֲ�ˮ�����ϵͳͨ�ü�������
���ӻ��������߱�̼�����ϵͳӦ��
����Ƕ��ʽ���ӻ����˿���ϵͳ���
�к�庸�ӻ�����ϵͳ�����м���Ӧ��