您当前的位置:首页>论文资料>基于嵌入式焊接机器人控制系统设计
内容简介
 第1期 2017年1月
第1期 2017年1月组合机床与自动化加工技术
ModularMachineTool&AutomaticManufacturingTechnique
文章编号:10012265(2017)01=008902
D0I:10.13462/j. cnki. mmtamt.2017.01.024
基于嵌人式焊接机器人控制系统设计*
张用,郝卫东,朱博,苗国强
(桂林电子科技大学机电工程学院,广西桂林541004)
No.1 Jan.2017
摘要:ARM处理器功耗低、成本低、体积小、外国电路简单、拥有丰富外设和I/O引脚等优点能满足不同接口且具有强大的数据信号处理能力。设计了基于嵌入式Linux焊接机器人控制系统,上位机采用Exynos四核Cortex-A9处理器芯片设计上位机硬件电路,以DSP芯片为下位机主控制器,采用 QT开发上位机控制系统软件进行OT移植。实验仿真证明:所设计的控制系统能够对机器人进行焊接控制,达到预期效果。
关键词:焊接机器人;上位机;QT
中图分类号:TH165;TG659
文献标识码:A
Design of Control in Welding Robot Based on Embedded ZHANG Yong,HAO Wei-dong, ZHU Bo-xuan,MIAO Guo-qiang
( College of Mechanical and Electrical Engineering, Guilin University of Electronic Technology, Guilin Guan-gxi 541004, China)
Abstract: ARM processor, with advantages of low power consumption, low cost, small size, simple pe-ripheral circuit, rich peripherals and IO pins, etc. has powerful data signal processing ability, which can meet different interfaces. Welding robot control system is based on Embedded Linux to design. Superior ma-chine hardware circuit is designed by Exynos four core cortex-A9 processor chip, and DSP chip is used as main lower computer controller. In order to transplant QT , upper monitor control software system is devel-oped by QT. The simulation experimental results show that the design of the control system can realize thc
function of welding control for robot, achieving the desired effect. Key words: welding robot; upper computer; QT
0引言
工业机器人"在工业生产领域得到广泛应用,除工业焊接机器人本体、驱动部分外.控制系统[2]是焊接机器人最重要的部分。郑天江等人提出采用工控PC 和运动控制通讯卡对机器人进行控制3」。张艳琼等人研究了基于Web service的控制系统[4],利用因特网的开放性实现远程数据交换、多平台接入。随着技术发展,具有控制系统架构可被生产厂家以外任何人进行二次开发的开放控制系统成为研究热点[5-],此开放式控制系统一般采用PC+运动控制卡模式进行控制,
ARM处理器功耗低、成本低、体积小且外围电路简单,同时ARM处理器拥有丰富的外设和I/O引脚、能满足不同接口且具有强大的数据信号处理能力8],故ARM处理器作为机器人控制器提供了可行性;嵌人式Linux内核源码开源特性,使得可以根据工程需要在搭建好的Ubuntu编译系统里任意裁剪内核,编译制作镜像再将程序下载到硬件电路里,硬件电路通电调式运行即可实现预期设计。传统工业焊接机器人控制
收稿日期:2016-03-26;修回日期:2016-04-26
*基金项目:国家自然科学基金项目(51305087);桂工信投资[2014]276号
采用示教器在线编程方法,操作人员在现场较固定位置对机器人操作控制焊接,相比传统机器人控制结合国内外最新技术,本文设计焊接机器人控制系统,以 DSP芯片为下位机主控器,上位机采用Exynos四核 Cortex-A9处理器芯片,设计上位机控制电路,运用QT 良好的跨平台移植性,采用QT开发上位机,将编译好
的QT镜像下载到上位机硬件电路。 1总体设计
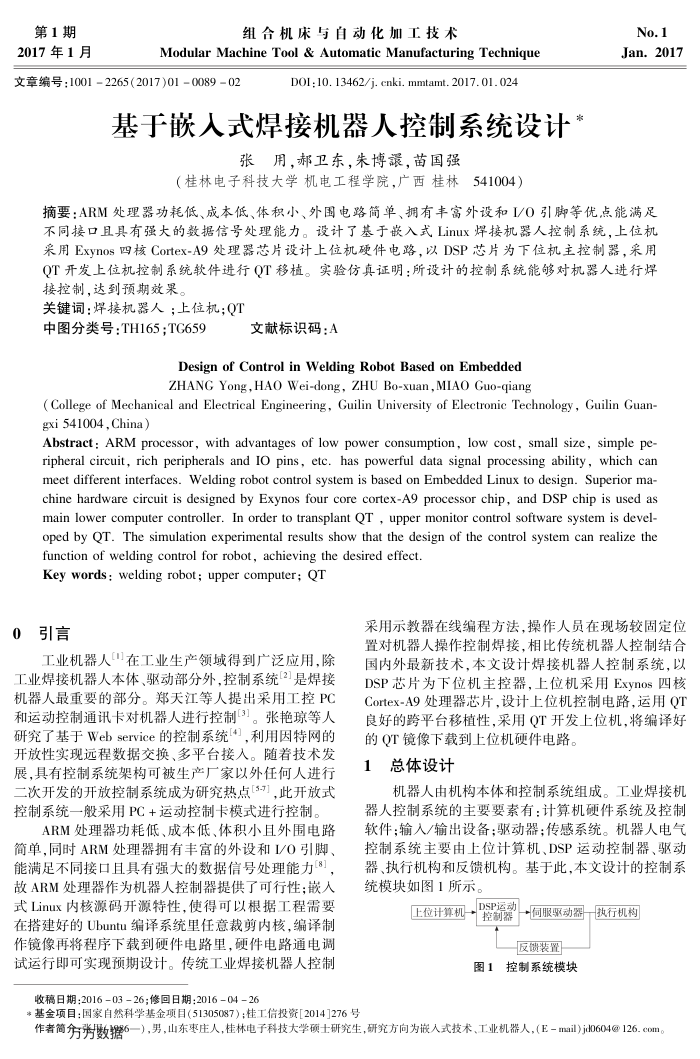
机器人由机构本体和控制系统组成。工业焊接机器人控制系统的主要要素有:计算机硬件系统及控制软件;输入/输出设备;驱动器;传感系统。机器人电气控制系统主要由上位计算机、DSP运动控制器、驱动器、执行机构和反馈机构。基于此,本文设计的控制系统模块如图1所示。
DSP通动同服驱动盟执行机构上位计算机一控制器
反馈装置
图1控制系统模块
作者简分粥数播6―),男,山东枣庄人,桂林电子科技大学硕士研究生,研究方向为嵌人式技术、工业机器人,(E-mail)jd604@126.com。