您当前的位置:首页>论文资料>路面铣刨机电阻式自复位双手柄行走操纵装置
内容简介
 技术・维修
技术・维修TECHNOLOGY &MAINTENANCE
路面铣刨机电阻式自复位双手柄
行走操纵装置吴海涛郭鹤周鑫
大型路面铣刨机车身庞大,操纵台宽度可达到2m以上,操作手在铣刨机作业或行走时需在操纵台两侧遵回观察情况,为此在操纵台两侧各设置1个行走手柄,以满足操需要。传统铣刨机通常采用机械连杆式电控双手柄行走操纵装置,即2个操纵手柄被连杆连接在一起,拨动其中1个操纵手柄,另1个手柄联动。这种手柄操纵起来比较沉重、舒适性较差,不能满足施工需要。本文介绍1种无机械连接,提纵轻松自如的电阻式自复位双手柄行走操纵装置。
1.组成及原理
(1)组成
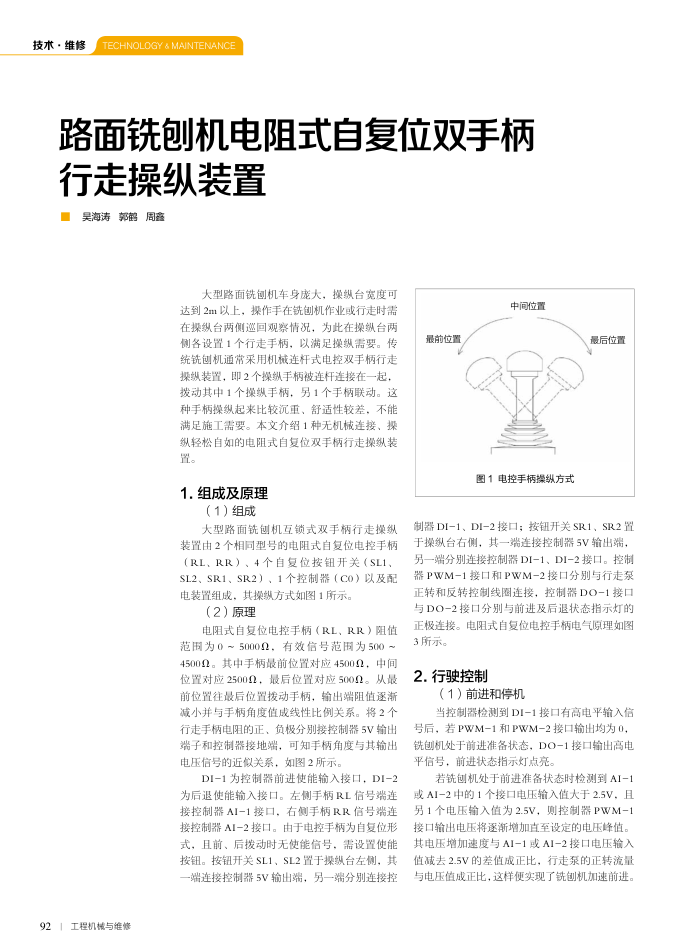
大型路面铣刨机互锁式双手柄行走操纵装置由2个相同型号的电阻式自复位电控手板(RL、RR)、4个自复位按钮开关(SL1. SL2、SR1、SR2)、1个控制器(Co)以及配电装置组成,其操数方式如图1所示。
(2)原理
电阻式自复位电控手柄(RL、RR)阻值范用围为0~5000.2,有效信号范围为500~ 45000。其中手柄最前位置对应45002,中间位置对应2500Q,最后位置对应5002。从最前位置往最后位置拨动手柄,输出端阻值逐渐减小并与手柄角度值成线性比例关系。将2个行走手柄电阻的正、负极分别接控制器5V输出端子和控制器接地端,可知手柄角度与其输出电压信号的近似关系,如图2所示。
DI-1为控制器前进使能输入接口,DI-2 为后退使能输入接口。左侧手柄RL信号端连接控制器AI-1接口,右侧手柄RR信号端连接控制器AI-2接口。由于电控手柄为自复位形式,且前、后拨动时无使能信号,需设置使能按钮。按钮开关SL1、SL2置于操纵台左侧,其端连接控制器5V输出端,另一端分别连接控
921工程机械与维修
最前位置
中间位置
图1电控手柄操纵方式
最后位置
制器DI-1、DI-2接口;按钮开关SR1、SR2置于操纵台右侧,其一端连接控制器5V输出端,另一端分别连接控制器DI-1、DI-2接口。控制器PWM-1接口和PWM-2接口分别与行走泵正转和反转控制线圈连接,控制器DO-1接口与DO-2接口分别与前进及后退状态指示灯的正极连接。电阻式自复位电控手柄电气原理如图 3所示。
2.行驶控制
(1)前进和停机
当控制器检测到DI-1接口有高电平输入信号后,若PWM-1和PWM-2接口输出均为0,铣刨机处于前进准备状态,DO-1接口输出高电平信号:前进状态指示灯点亮。
若铣刨机处于前进准备状态时检测到AI-1 或AI-2中的1个接口电压输入值大于2.5V,且另1个电压输入值为2.5V,则控制器PWM-1 接口输出电压将逐渐增加直至设定的电压峰值。其电压增加速度与AI-1或AI-2接口电压输入值减去2.5V的差值成正比,行走泵的正转流量与电压值成正比,这样便实现了铣刨机加速前进。
上一章:国内除雪机械现状及发展趋势
下一章:检验推土机后桥箱焊缝渗漏缺陷的新方法