基于被动光的MAG管道打底焊焊缝边缘提取方法
内容简介
 第32卷第10期 2011年10月
第32卷第10期 2011年10月焊接学报
TRANSACTIONSOFTHECHINAWELDINGINSTITUTION
Vol.32No.10 October2011
基于被动光的MAG管道打底焊焊缝边缘提取方法
李静!2,李芳2,朱伟?,廖剑雄,钱鲁泓2
00
摘要:焊缝跟踪是实现焊接自动化的前提条件,间欧的变化会影响基于熔化极气体保护焊(metalactivegas,MAG)的管道自动打底焊的焊接质量,为此设计了基于电荷耦合器件(charge-coupleddevie,CCD)视觉传感的MAG打底焊焊接过程监控系统,但从 CCD获取的焊接过程的图像通常具有很大噪声,垂需设计出有效的焊缝边缘提取方法,提出了一种新的焊缝边缘提取方法,使用预处理方法获取熔池区域,然后使用Sobel算子检测出候选左(下)焊缝位置作为贪婴Snake模型的初始轮廓控制点,使用负委Snake 模型拟合焊缝边缘,结果表明,即使在出现噪声的图像中,该方法提取焊缝边级也是有效的
关键调:焊缝跟踪:Snake模型:MAG焊:图像处理
中图分类号:TP391 0序言
文献标识码:A
文章编号:0253360X(2011)10-0069-04
1试验系统
近年来,中国管道运输业在原油、成品油和天然气的储运中扮演了重要角色,因面对管道建设过程中的焊接生产自动化过程提出了更高的要求,管道焊接中的重要步骤是打底焊,因生产效率高,变形小,易于实现单面焊双面成形等特点,MAG焊受到了广泛的重视,但焊接过程中,单纯依赖MAG焊接电源与焊接工艺,不能有效解决管道打底焊中因焊缝坡口宽度变化等带来的不确定性问题,因此焊接领域许多研究者开始致力于设计一种有效的MAG 管道打底焊焊缝跟踪技术伴随着CCD集成光电器件的广泛应用以及计算机图像处理技术的快速发展,视觉传感器在焊接过程控制、焊缝跟踪等领域得到了广泛应用,但MAG焊焊接过程中通常伴有大量飞溅、烟尘以及强烈弧光干扰,使CCD获取到的焊缝区域图像具有很大噪声,迫切需要有效的图像处理算法[23]提取出焊缝边缘位置,为后续的焊缝跟踪控制打下良好基础
文中在已有的管道打底焊自动化设备基础上开展了基于CCD被动光的管道MAC打底焊的有效图像处理算法的分析,设计了一种结合Sobel变换与贪婪Snake模型的焊接图像处理方法,提取较准确的焊缝边缘.
收稿日期:2010-09-01
基金项目:江苏省科技成果转化专项基金资助项目(BA2007058)万方数据
李静
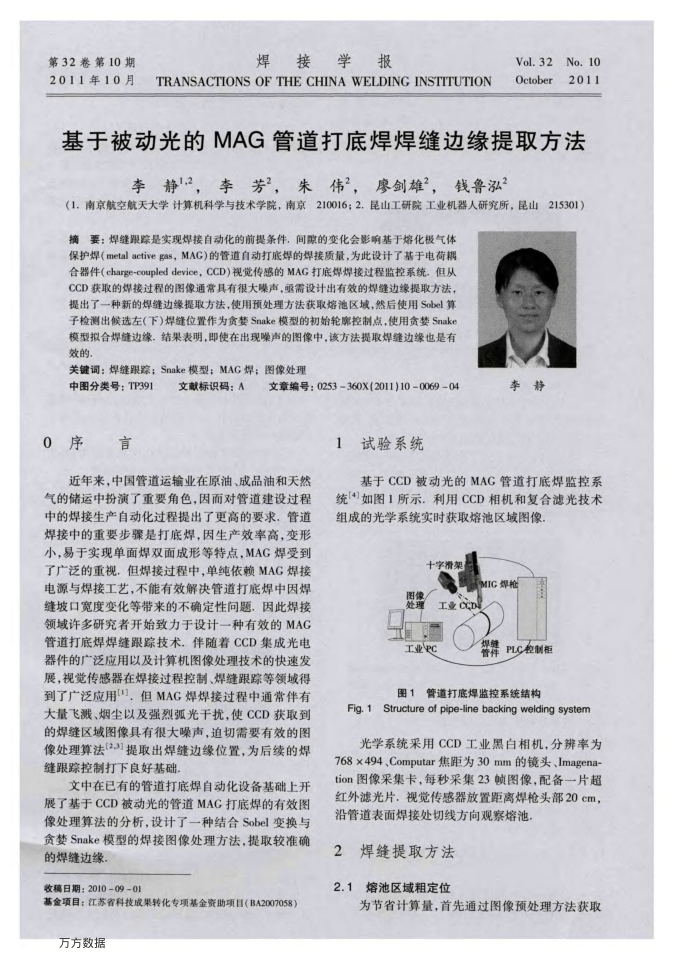
基于CCD被动光的MAG管道打底焊监控系统[4]如图1所示.利用CCD相机和复合滤光技术组成的光学系统实时获取熔池区域图像,
十字滑架
图像经理
工业ec
MIG焊枪
工业OCD
暂裤PLC经制柜煤维
图1管道打底焊监控系统结构
Fig.1 Structure of pipe-line backing welding system 光学系统采用CCD工业黑白相机,分辨率为
768×494、Computar焦距为30mm的镜头、Imagena-tion图像采集卡,每秒采集23顿图像,配备一片超红外滤光片,视觉传感器放置距离焊枪头部20cm,沿管道表面焊接处切线方向观察熔池
2
焊缝提取方法
2.1熔池区域粗定位
为节省计算量,首先通过图像预处理方法获取
上一章:基于银合金先导润湿的铜磷钎料钎焊钢
下一章:基于视频定位的焊缝缺陷超声检测技术