您当前的位置:首页>论文资料>应用于管道内检测器的管道地理坐标测量方法
应用于管道内检测器的管道地理坐标测量方法
内容简介
 2013年第11期
2013年第11期仪表技术与传器 InstrumentTechniqueandSensor
应用于管道内检测器的管道地理坐标测量方法
杨理践,沈博,高松巍
(沈阳工业大学信息科学与工程学院,辽宁沈阳
110870
2013 No. 11
摘要:针对现役管道地理坐标测量问题,介绍了一种基于惯性/里程仪组合导航原理的管道地理坐标测量方法。将组合导航系统搭载于管道内检测器(PIG)上,在管道内检测作业的同时,完成对PIG运动信息的采集。应用光纤惯性测量单元和里程仪来测量角速度、加速度及地速等运动信息,并通过机载计算机(PC104)实现实时保存。详细介绍了地理坐标解算算法的基本方程和应用Kalman滤波进行运动信息处理的方法。地上实验标明;该方法可以提供准确的地理坐标信息,600m地面实验机速解算后,误差小于4m.
关键词:管道内检测器;组合导航;卡尔受滤波;管道地理坐标测量;惯性测量单元
中图分类号:V249
文献标识码:A
文章编号:10021841(2013)11008404
Method ofPipelineGeographicMeasurementAppliedtoPipelineInspectionGauge
YANG Li-jian,SHEN Bo, GAO Song-wei
( School of Information Science and Engineering,Shenyang University of Technology,Shenyang 110870, China)
Abstract:To measure the position of pipeline, a method based on SINS/OD integrated navigation system was proposed. As PIG do the detection of pipeline,this system will record PIGs motion information, The angle velocity , acceleration, and ground ve-loctity were measured by the fiber-optic inertial measurement unit( IMU) and Odometer, and were saved continuously by the system on the industry computer (PC104). The essential algrithm of the position calculation was introduced in detail and the Kalman filter was built to process the original information from sensors, Through compering the processing result of the experiment and the real experiment trajectory ,there is less than 4 m position error after 600 m distance.
Key words: PIG; integrated navigation; Kalman filter;pipeline geographic position measurment;inertial measurment unit
。引言
在石油天然气的运输方式中,管道运输因其成本低、安全性高、可不间断作业等特点面成为最主要的运输手段。但是由于管道铺设于地下或海底,所以一般的地上方法很难获得准确的管道地理坐标信息。管道内检测器(PipelineInspection Gauge,PIG),又称管道内检测机器人,是主要的管道检测与测量设备(1]。PIG依靠运输介质在管道内运输时,在PIG前后产生的压力差作为动力,通过加装在其上的探伤传感器对管道膜蚀、形变情况进行检测,为管道的质量评估及维护提供依据[2] 在管道内检测技术中,主要存在管道内伤的检测和管道内伤的定位这两个难题。就管道内伤的定位间题,如果可以获得管道地理坐标,就可以实现管道内伤的准确定位。目前,国内PIC 主要采用多里程仪组合的定位方式,该方式依靠多个里程仪进行测量,结构简单,但是存在依靠人工经验的缺陷,定位误差在 ±20m范围内[3-5),且无法获得绝对的地理坐标位置信息。
为提供管道地理坐标信息,研究了一种基于组合导航原理的管道内检测器定位方法。应用惯性传感器测量PIC在管道内运行时的运动数据,并通过机载计算机进行实时记录存储。内检测作业结束后,应用组合导航算法对存储的运动数据进行处理,解算出PIG运行时任一时刻大的地理坐标和姿态[6-8]
基金项目:国家自然科学基金项目(60927004,61141004);十二五国家科技部支撑计划项目(2011BAK06B01-03)
收稿日期:201212-04收修改稿日期:201306-13
对于管道地理坐标测量和管道维护等问题的解决具有重要的应用价值。
管道地理坐标测重方法整体结构
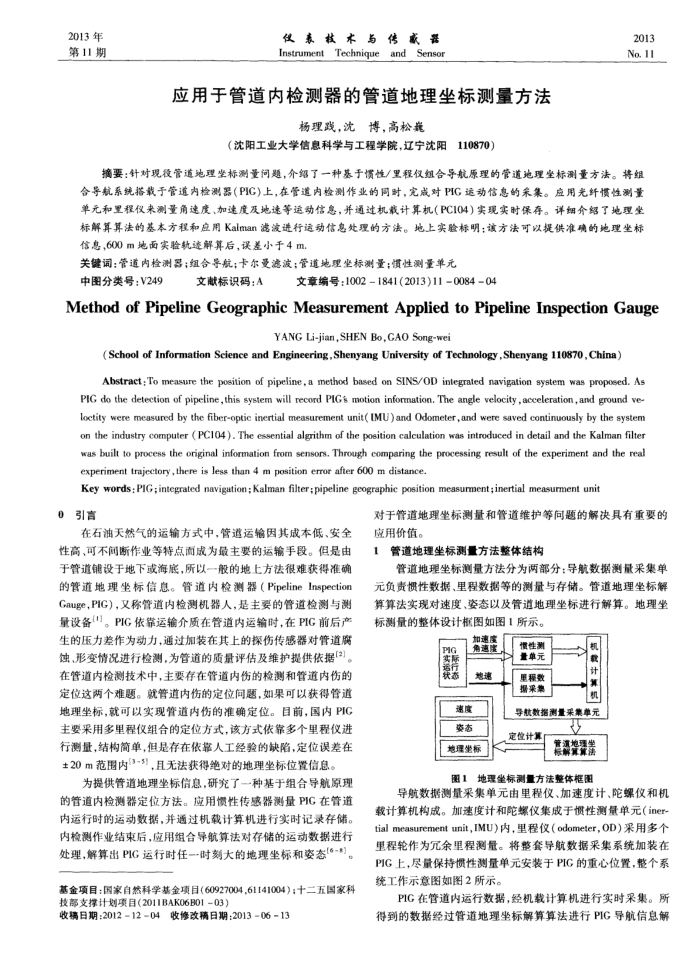
管道地理坐标测量方法分为两部分:导航数据测量采集单元负责惯性数据、里程数据等的测量与存储。管道地理坐标解算算法实现对速度、姿态以及管道地理坐标进行解算。地理坐标测量的整体设计棚图如图1所示。
丽帆新端
加速度角速座
地速
速度姿态地理坐标
图1
惯性测量单元
里程数据采兼
y机在
导献数据测量采集单元
定位计算
企慕藻烧疆嘴
地理坐标测量方法整体框图
导航数据测量采集单元由里程仪、加速度计、陀螺仪和机载计算机构成。加速度计和陀螺仪集成于惯性测量单元(iner tialmeasurementunit,IMU)内,里程仪(odometer,OD)采用多个里程轮作为允余里程测量。将整套导航数据采集系统加装在 PIG上,尽量保持惯性测量单元安装于PIG的重心位置,整个系统工作示意图如图2所示。
PIG在管道内运行数据,经机载计算机进行实时采集。所得到的数据经过管道地理坐标解算算法进行PIG导航信息解
上一章:基于LVDS的石油管道检测系统
下一章:埋地管道腐蚀的瞬变电磁法检测探头优化设计