您当前的位置:首页>论文资料>气动助力平衡吊设计及应用
内容简介
 Academic 学术
Academic 学术气动助力平衡吊设计及应用,
昆明船的设备研究试验中心-杨冲国家工程机械质量监管检验中心-陈坤
搞要:
气动助力平衡吊是近年来在国际上兴起的一项新型吊装设备,由于其具有的结构单、价格低廉、高效,节能、无污染等特点,气动助力平衡吊在工业生产中得到越来越广泛的应用,本论文对平衡吊的平衡原理做了篇要推导,对平衡常的驱动方式进行了比较分析,根根平衡原理设计了一种室内专用的平衡吊,确定了工作臂架几何参数,并简要介绍了平衡吊的应用。
滚轮E主动),可沿水平导槽内外移动。
1平衡吊简介
助力平衡吊即助力机械手,又称助力器,平衡吊、平衡器、省力吊具、手动移载机等。是一种理想的中小型机械吊运设备,它巧妙地运用四连杆机构原理,通过手动和机动方式简单配合形成一种复合运动来摄运吊物,使吊物能稳定地停留在作业区间的任一位置上,做到随遇平衡。平衡吊的平街臂起升和下降运动采用电动机、液压油缸或气缸来驱动,水平移动和回转运动则采用人力推控,推控力一般不超过5公斤。在操作装置升降物件时,操作者累换物件作业,如同我们正常直接报运物件一样,回转自如面不费力。
2平衡吊平衡原理
平衡吊工作时,能用手轻便的进行变幅,松开手款能静止不动,通常称之为平衡吊的平衡原理。
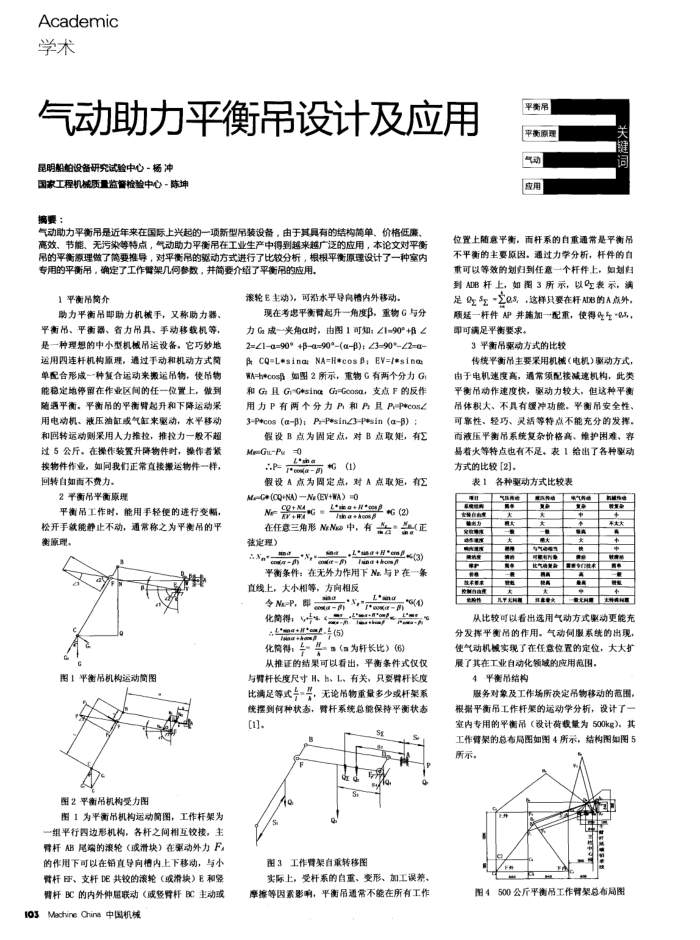
图1平衡吊机构运动简图图2平衡吊机构受力图
图1为平衡吊机构运动筒图,工作杆架为一组平行四边形机构,各杆之间相互铰接,主臂杆AB尾瑞的滚轮(或滑块)在聚动外力F。的作用下可以在销直导向槽内上下移动,与小臂杆EF、支杆DE共铰的滚轮(或滑块)E和察臂杆BC的内外伸届联动(或整臂杆BC主动或
103Mechine Chine 中国机械
现在考虑平衡臂起升一角度β,重物G与分力G成一类角α时,由图1可知:Z1=90°+β乙 2=Z1a=90° +βα=90°(αβ); Z390*2=α β CQ=L*sina: NA=H*cos β; EV=/*sing A=h*cos净如图2所示,重物G有两个分力G 和 G且GrCtsinoGr=Geosa,支点F 的反作用力P有两个分力P和P且P=P*cosZ 3-P*cos (αβ): Pr=PesinZ3-P*sin (aβ) ;
假设B点为固定点,对B点取矩,有Z M=Gru-Pe =0
)
he
假设A点为固定点,对A点取矩,有Z MeC+(CQ+NA) ―N (EV+WA) =0
(2) + 8-N
Itin a+hoos
在任意三角形NN中,有(正
弦定理)
(*
waP)
0
平衡条件:在无外力作用下N与P在一条直线上,大小相等,方向相反
L*ina*6(4)
..mdN
shd
化商街: m-午(5)
化篇得:手一号(n为杆长比》(6) 从推证的结果可以看出,平衡条件式仅仅与臂杆长度尺寸H、h、L、有关,只要臂杆长度比满足等式于一兴,无论吊物重量多少或杆架系统摆到何种状态,臀杆系统总能保持平衡状态
[1].
S
图3工作臀架自重转移图
实际上,受杆系的自重、变形、加工误差、摩擦等因累影响,平衡吊通常不能在所有工作
平衡吊平衡原理气动应用
位置上随意平街,而杆系的自重通常是平衡吊不平衡的主要原因。通过力学分析,杆件的自重可以等效的划归到任意一个杆件上,如划归到ADB杆上,如图3所示,以Q表示,满足-e5,,这样只要在杆AB的A点外,顾延一杆件AP并施加一配重,使得生至“,即可满足平衔要求。
3平衡吊弱动方式的比较
传统平衡吊主要果用机械(电机)弱动方式,由于电机速度高,通常须配接减速机构,此类平衡吊动作速度快,驱动力较大,但这种平衡吊体积大、不具有缓冲功能,平衡吊安全性、可靠性、轻巧、灵括等特点不能充分的发挥,而液压平衡吊系统复杂价格高、维护困难、容易着火等特点也有不足。表1给出了各种聚动方式的比较[2]。
表1 系装服养
各种驱动方式比较表电
新城nt
欢源养动气池
抢M的a康
党#中工#营文
都北主井#
从比较可以看出选用气动方式聚动更能充分发挥平衡品的作用。气动伺服系统的出现,使气动机核实现了在任意位置的定位,大大扩展了其在工业自动化领域的应用范围,
4平衡吊结构
服务对象及工作场所决定吊物移动的范围,根据平衡吊工作杆架的运动学分析,设计了室内专用的平街吊(设计荷载量为500kg),其工作臂架的总布局图如图4所示,结构图如图5 所示。
中国家家务型 aataa
图4500公斤平街席工作臂架总布局图
上一章:液压安全联轴器的选型计算
下一章:浅析液压支架电液控技术现状及发展趋势