您当前的位置:首页>论文资料>超声波雷达倒车系统的设计及其应用
内容简介
 数字热本与变用
数字热本与变用超声波雷达倒车系统的设计及其应用
裴暑云1谢强伟
设计开发
(1.国家知识产权局专利局专利审查协作广东中心广东广州510000:2.广州计量检测技术研完院广东广州510000)
摘要:本文根据声波在空气中传播后反射四来,以超声波传感器作为传感器测量障碍物的距离的工作原理,设计了一种利用单片机实现在交通工其后部探测障碍物,利用超声波实现无接融测距的雷达例车系统,给出了系统的工作原理、设计思露和具体的设计方案,该系统经实验证明可行,低成本、性价比高
关键调:超声波测距单片机例车
中图分类号:TN959 1系统工作原理
文献标识码:A
文章编号:1007-9416(2013)08-0157-0)
2.3单片机处理单元
超声波发射后遇到障碍物反射回来送人超声波传感器,而何时
超声波倒车系统由超声波传感器、单片机控制器和显示器等部分组成。超声波传感器将电能和超声波相互转化,实现测距,车尾的超声波传感器发送超声波遇到障碍物后,发射回来经超声波传感器接收后传给单片机控制器进行处理,得到障碍物距离交通工具的距离,将数据由送入显示器显示,能够探测0.25~2.5m范图内的障碍物,以及利用声音报警和LED发光二极管实现声光提示报警,用于提醒驾驶人员,实现轻松倒车。
1.1超声波传感器
超声波具有的优点使得超声波在距离的测量中的应用广泛。超声波传感器将电能和超声波相互转化,采用压电材料的压电传感器是超声检测中最常用的一种传感器,当发射超声波时,将压电材料置于电场之中,它产生一定的应变对压电材料加以交变电场,会产生交变的应变,从而产生超声振动,当接收超声波时,由于超声波的声波效果,压电材料在声波的压力作用下引起振动变形,形变可等效转换为电信号。压电品体的谱报产生超声波,共振时,其频率为压电晶片的固有振荡频率(即中心额率)
超声波传感器的频率特性,SZW-S40-12M发射型超声波发射传感器的升压能级中,超声波发射的中心频率为40KHz,超声声压能级最高,超声波传感器产生共振,可将超声波波长入设为0.85cm,超声波接收传感器的频率特性类似,
1.2超声波测量距高的原理
超声波发射后遇到障碍物反射回来送人超声波传感器,而何时反射回来无法确定,需要超声传感器一直查询检测发射回来的信号,从而计算出时间差t,代入公式S=Ct/2,求出距离S,S为超声波发射点与被测障碍物之间的距离,其中,C为声波在介质中的传输速率,t为超声波发射到超声波返回的时间间,超声波声速C与温度有关,温度变化不大时可认为声速是基本不变,确定声速,并测得
超声波从发射到接收的时间,可求得距离。 2系统主要构成
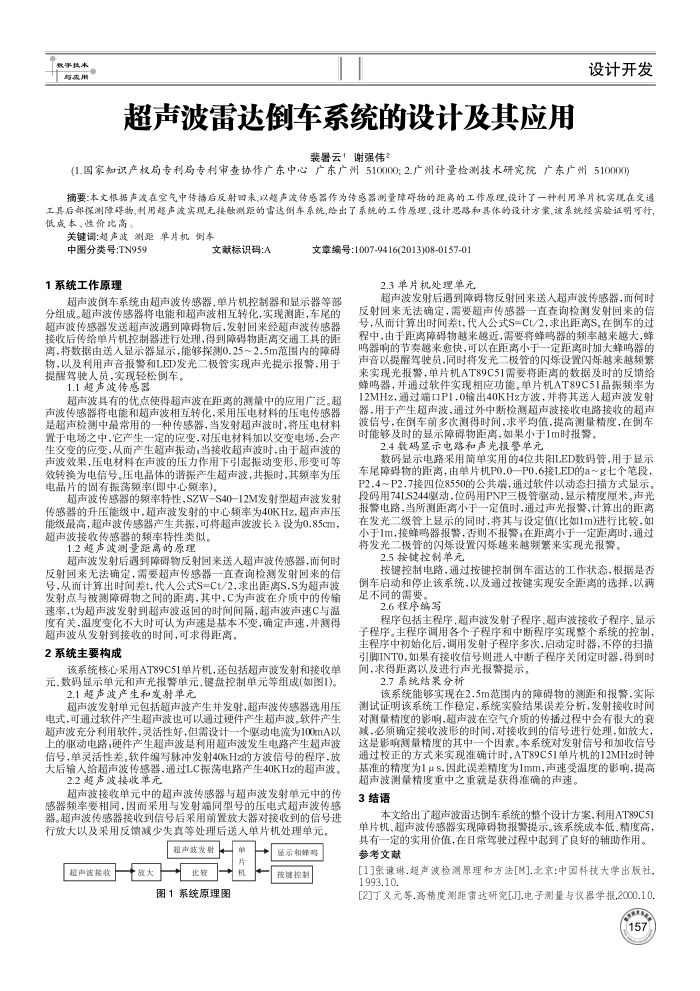
该系统核心采用AT89C51单片机,还包括超声波发射和接收单元、数码显示单元和声光报警单元,键盘控制单元等组成(如图1)。
2.1超声波产生和发射单元
超声波发射单元包括超声波产生并发射,超声波传感器选用压电式,可通过软件产生超声波也可以通过硬件产生超声波。软件产生超声波充分利用软件,灵活性好,但需设计一个驱动电流为100mA以上的驱动电路,硬件产生超声波是利用超声波发生电路产生超声波信号,单灵活性差。软件编写脉冲发射40kHz的方波信号的程序,放大后输人给超声波传感器,通过LC振荡电路产生40KHz的超声波。
2.2超声波接收单元
超声波接收单元中的超声波传感器与超声波发射单元中的传感器频率要相同,因而采用与发射端同型号的压电式超声波传感器。超声波传感器接收到信号后采用前置放大器对接收到的信号进行放大以及采用反馈减少失真等处理后送人单片机处理单元。
超声波发射单
超声披接收
+故大上
比较
片机
图1系统原理图
显示和蜂鸡按键控制
反射回来无法确定,需要超声传感器一直查询检测发射回来的信号,从而计算出时间差t,代人公式S=Ct/2,求出距离S在倒车的过程中,由于距离障碍物越来越近,需要将蜂鸣器的颊率越来越大,蜂鸣器响的节奏越来愈快,可以在距离小于一定距离时加大蜂鸣器的声音以提醒驾驶员,同时将发光二极管的内炼设置闪烁越来越频繁来实现光报警,单片机AT89C51需要将距离的数据及时的反馈给蜂鸣器,并通过软件实现相应功能,单片机AT89C51品振频率为 12MHz,通过蒲口P1,0输出40KHz方波,并将其送人超声波发射器,用于产生超声波,通过外中断检测超声波接收电路接收的超声波信号,在倒车前多次测得时间,求平均值,提高测量精度,在倒车时能够及时的显示障碍物距离,如果小于1m时报警。
2.4数码显示电路和声光报警单元
数码显示电路采用简单实用的4位共阳LED数码管,用于显示车尾障碍物的距离,由单片机PO.0一P0.6接LED的a~g七个笔段, P2.4~P2.7接四位8550的公共端,通过软件以动态扫描方式显示。段码用74LS244驱动,位码用PNP三极管驱动,显示精度厘米。声光报警电路,当所测距离小于一定值时,通过声光报警,计算出的距离在发光二级管上显示的同时,将其与设定值(比如1m)进行比较,如小于1m,接蜂鸣器报警,否则不报警,在距离小于一定距离时,通过将发光二极管的闪炼设置闪炼越来越频警来实现光报警
2.5按键控制单元
按键控制电路,通过按键控制倒车雷达的工作状态,根据是否倒车启动和停止该系统,以及通过按键实现安全距离的选择,以满足不同的需要,
2.6程序编写
程序包括主程序、超声波发射子程序、超声波接收子程序、显示子程序。主程序调用各个子程序和中断程序实现整个系统的控制,主程序中初始化后,调用发射子程序多次,启动定时器,不停的扫描引脚INTO,如果有接收信号则进人中断子程序关闭定时器,得到时间,求得距离以及进行声光报警提示。
2.7系统结果分析
该系统能够实现在2.5m范国内的障碍物的测距和报警,实际测试证明该系统工作稳定,系统实验结果误差分析,发射接收时间对测量精度的影响,超声波在空气介质的传播过程中会有很大的衰减,必须确定接收波形的时间,对接收到的信号进行处理,如放大,这是影响测量精度的其中一个因素。本系统对发射信号和加收信号通过校正的方式来实现准确计时,AT89C51单片机的12MHz时钟基准的精度为1μs,因此误差精度为1mm,声速受温度的影响,提高
超声波测量精度重中之重就是获得准确的声速。 3结语
本文给出了超声波雷达倒车系统的整个设计方案,利用AT89C51 单片机、超声波传感器实现障碍物报警提示。该系统成本低,精度高,具有一定的实用价值,在日常驾驶过程中起到了良好的辅助作用。参考文献
[1]张谦琳.超声波检测愿理和方法[M].北京:中国科技大学出版社, 1993.10.
[2]丁文元等.高精度测距雷达研[J].电子测量与仪器学报,2000.10
157