您当前的位置:首页>论文资料>XSJ-II小功率随动系统设计
内容简介
 设计开发
设计开发XSJ-II小功率随动系统设计
余兰林
(西南大学工程技术学院重庆400716)
事与应用
摘要:本文给出了建立xsj-1l小功率随动系统模型的方法以及实际系统调试过程中应注意的几点,热后用matlab进行数据处理和系统仿真,介绍了多种校正仿真设计,并分析了各种校正方法对系统的稳定性和稳态精度的影响。在款件仿真中还考虑了实际系统运行时的非线性素的影响,通过实验数据表明,该方法能更好的指导实际系统的调试。
关键调:随动系统matlab仿真系统校正PID控制器
中图分类号:TP275
文献标识码:A
文章编号:1007-9416(2012)07-0120-01
位置随动是指输出的位移随位置给定输入量的变化而变化,位置随动控制系统要求有好的跟随性,所以大多采用闭环反馈控制,位置随动系统中的给定量是经常变动的,不定的,面且要求输出量准确跟随给定量,输出响应具有快速性、准确性。为了同时兼顾系统的稳态和动态性能,系统必须要有校正装置,为了提高位置随动系统的控制精度,还增加系统的开环放大倍数或在系统中增加积分环节等。
1、系统模型建立
1.1理论建模
整个系统是由给点电位器,两个运算放大器,功率放大器,执行电机和反馈电位器组成。
系统结构图如下图所示
运算放大
给密电位源
A1
反读电位零
XSJ-II小功率随动系统结构 1.2实际建模
落算效大 S A2
执行电机
功放效目
测速发电机
反馈电位器和给定电位器均是型号为WD65S-2的导电材料电位器,因此二者的传递函数相同为K0。但由于反馈电位器的磨损,二者的传递函数分别设为K0与Kf,运算放大器A1增益为K1,运算放大器A2的增益为K2,运算放大器A3和功率放大器的增益为K3。电机中电磁时间常数T1<
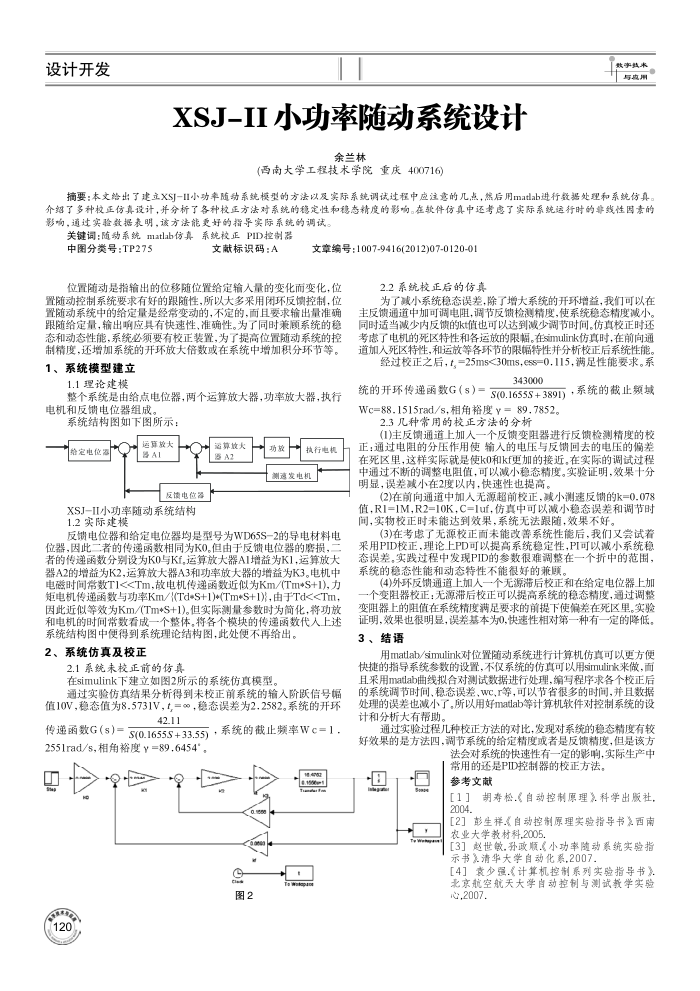
2.1系统未校正前的仿真
在simulink下建立如图2所示的系统仿真模型,
通过实验仿真结果分析得到未校正前系统的输入阶跃信号幅值10V,稳态值为8.5731V,,=,稳态误差为2.2582。系统的开环
42.11
传递函数G(s)=S(0.165+33.55,系统的截止频率Wc=1. 2551rad/s,相角裕度=89.6454",
1906
9 e.oo
图2
awtopan
2.2系统校正后的仿真
为了减小系统稳态误差,除了增大系统的开环增益,我们可以在主反馈通道中加可调电阻,调节反馈检测精度,使系统稳态精度减小。同时适当减少内反馈的kt值也可以达到减少调节时间。仿真校正时还考虑了电机的死区特性和各运放的限幅。在simulink仿真时,在前向通道加入死区特性,和运等各环节的限幅特性并分析校正后系统性能。
经过校正之后,t,=25ms<30ms,ess=0.115,满足性能要求。系
343000
S(0.1655S+3891),系统的截止额域
统的开环传递函数G(s)=
Wc=88.1515rad/s,相角裕度=89.7852。
2.3几种常用的校正方法的分析
(1)主反馈通道上加人一个反馈变阻器进行反馈检测精度的校正:通过电阻的分压作用使输入的电压与反馈回去的电压的偏差在死区里,这样实际就是使k0和kf更加的接近。在实际的调试过程中通过不断的调整电阻值,可以减小稳态精度。实验证明,效果十分明显,误差减小在2度以内,快速性也提高
(2)在前向通道中加人无源超前校正,减小测速反馈的k=0.078 值,R1=1M,R2=10K,C=1uf.仿真中可以减小稳态误差和调节时闻,实物校正时未能达到效果,系统无法跟随,效果不好。
(3)在考虑了无源校正面未能改善系统性能后,我们又尝试着采用PID校正,理论上PD可以提高系统稳定性,PI可以减小系统稳态误差,实践过程中发现PID的参数很难调整在
一个折中的范围,
系统的稳态性能和动态特性不能很好的兼顾
(4)外环反馈通道上加人一个无源滞后校正和在给定电位器上加一个变阻器校正:无源滞后校正可以提高系统的稳态精度,通过调整变阻器上的阻值在系统精度满足要求的前提下使偏差在死区里。实验证明,效果也很明显,误差基本为0,快速性相对第一种有一定的降低,
3、结语
用matlab/simulink对位置随动系统进行计算机仿真可以更方便快捷的指导系统参数的设置,不仅系统的仿真可以用simulink来做,面且采用malab曲线拟合对测试数据进行处理,编写程序求各个校正后的系统调节时间、稳态误差,WC、r等,可以节省很多的时间,并且数据处理的误差也减小了,所以用好matab等计算机软件对控制系统的设计和分析大有帮助,
通过实验过程儿种校正方法的对比,发现对系统的稳态精度有较好效果的是方法四,调节系统的给定精度或者是反馈精度,但是该方
法会对系统的快速性有一定的影响,实际生产中
常用的还是PID控制器的校正方法。参考文献
胡寿松.《自动控制原理》科学出版社,
[1 2004.
[2]彭生样《自动控制原理实验指导书》西南农业大学教材科,2005
[3]赵世敏.孙政顺《小功率随动系统实验指示书》清华大学自动化系,2007
[4]变少强(计算机控制系列实验指导书》北京航空航天大学自动控制与测试教学实验心,2007.
上一章:OFDM系统中降低峰均比的算法研究
下一章:X射线安检装置实时成像系统设计