您当前的位置:首页>论文资料>航天测控系统中双向多普勒测速误差分析
内容简介
 数事费本与率用
数事费本与率用学术论坛
航天测控系统中双向多普勒测速误差分析
成亚勇
(中国电子科技集团第五十四研究所河北石家庄050081)
摘要:航天测控系统中多普勃测速是外测的主要手投提高测造精度就需要分新引起测速误差的主要因素。道过对测控系统中各个环节产生的误差源进行分析给出了影响测速精度的频率源短稳、接收机热噪声、终端设备量化误差和电波传持等因素,并分别针对这儿种误差源进行了详细期速,通过对误差产生的机理分析提出了不同误差对应的解决方案和实境方法,为测控系统的设计和开发提供了理论基础和工程参考。
关键词:多善物测速锁相环接收机阿伦方差DDS
中图分类号:TN958
文献标识码:A
多善勒测速是测量导弹和卫星运行轨道的主要方法之一。它包括双向多普勒测速和单向多普勒测速,双向多普勒测速是航天测控系统用得最广泛的一种测速手段,它根据运动目标产生的多普勒效应原理,对航天器的运动速度进行高错度的实时测量
航天测控系统中频率源的短稳、接收机的热噪声,终端设备量化误差以及电波传播等因素都会引起系统的测速误差针对系统中各个误差源通过理论推导和仿真分析测速误差,为提高测控系统的
测速精度提出应对方案。 1多普勤测速原理
多善勒测量目标速度的原理是基于物理学上的多普勤效应。当目标飞向雷达站时,多普勤频率为正值接收信号频率高于发射频率,当目标背离雷达飞行时,多普勒频率为负值,接收信号频率低于发射频率。
通过推导可得出多普勒频率: =
f为多善普勒赖率,f为发射频率。通过公式可知,测速误差主要分
析f与f的误差。 2误差分析
对于双向多普勒测速系统,有各种误差源会引起测速误差,下面对各种误差源引起的测速误差进行分析。
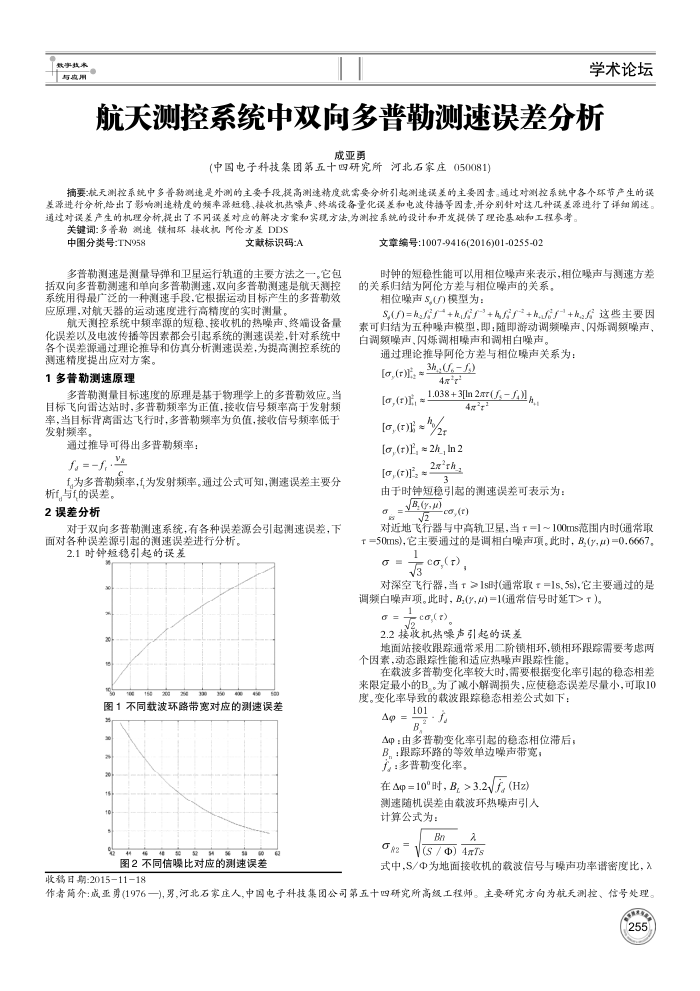
2.1时钟短稳引起的误差
图1不同载波环路带宽对应的测速误差图2不同信噪比对应的测速误差
收稿日期:201511-18
文章编号:1007-9416(2016)01-0255-02
时钟的短稳性能可以用相位噪声来表示,相位噪声与测速方差的关系归结为阿伦方差与相位噪声的关系,
相位噪声S())模型为:
S()=h+hf-"+h-+h/-+ha这些主要因素可归结为五种噪声模型,即:随即游动调频噪声、闪烁调频噪声、白调额噪声、闪炼调相噪声和调相白噪声,
通过理论推导阿伦方差与相位噪声关系为:[o,()3h-
4x**2
1.038 + 3[n 2.mr(F J
[a,(r)正,
4元~-
[,() %[o,(r), 2h, In 2[,(r)28th
由于时钟短稳引起的测速误差可表示为: B (y)
o
co,(t)
对近地飞行器与中高轨卫星,当T=1~100ms范围内时G通常取 T=50ms),它主要通过的是调相白噪声项。此时,B,(y,μ)=0.6667。
G=
()03-y3
对深空飞行器,当t>1s时(通常取t=1s.5s),它主要通过的是调频白噪声项。此时,B,(y,)=1(通常信号时延T>T)。
c,(r)
2.2接敢机热噪声引起的误差
地面站接收跟踪通常采用二阶锁相环,锁相环跟踪需要考虑两个因素,动态跟踪性能和适应热噪声限踪性能。
在载波多普勒变化率较大时,需要根据变化率引起的稳态相差来限定最小的B。为了减小解调损失,应使稳态误差尽量小,可取10 度。变化率导致的载波跟踪稳态相差公式如下:
Ao :
101
&
P:由多普勒变化率引起的稳态相位滞后;
B,:跟踪环路的等效单边噪声带宽;了:多普勤变化率。
在=10°时,B,>3.2V元(Hz) 测速随机误差由载波环热噪声引人计算公式为:
Bn
0 m2= (s / 0) 4元Ts
式中,S/中为地面接收机的载波信号与噪声功率谱密度比,入
作者篇介:成亚勇(1976一),男,河北石家庄人,中国电子科技集团公司第五十四研究所高级工程师。主要研究方向为航天测控、信号处理。
255